|
VLink 2.0.0
A high-performance communication middleware
|
|
VLink 2.0.0
A high-performance communication middleware
|
一个面向自动驾驶与具身智能的轻量级高性能通信中间件
Github: https://github.com/thun-res/vlink
随着自动驾驶与具身智能产业的高速发展,车载与机器人系统对进程间通信(IPC)中间件的性能、可靠性与可移植性提出了前所未有的高要求。现有主流方案——包括 ROS2、eProsima Fast-DDS、SOME/IP 等——在传输后端绑定、API 复杂度、序列化开销、调试工具链完整性等方面均存在明显短板。国内自动驾驶与智能机器人产业的高速崛起,也对中间件的国产化、自主可控提出了迫切诉求。
本文以开源项目 VLink 为研究对象,深入分析其产生背景、核心设计理念、体系结构与关键技术。VLink 以"一套极简的 API,多种传输,切换零代价"为核心目标,提供事件(Event)、方法(Method)、字段(Field)三种通信模型共六种通信原语(Publisher、Subscriber、Server、Client、Getter、Setter),支持 intra、shm、shm2、dds、ddsc、ddsr、ddst、zenoh、someip、mqtt、fdbus、qnx 共 12 种传输后端,并内置零拷贝、安全加密、多格式序列化、消息录制、实时发现监控、CLI 工具链等完整的工程能力。本文从行业背景、痛点剖析、架构设计、技术优势、横向对比、性能分析、开发效率与调试工具等维度展开系统论述,力图为自动驾驶与具身智能领域的中间件选型与设计提供参考。
关键词: 中间件;进程间通信;自动驾驶;具身智能;DDS;ROS2;零拷贝;国产化;VLink
过去十年,人工智能技术的突破性进展催生了自动驾驶与具身智能两大产业方向的爆发式增长。自动驾驶车辆需要在毫秒级时间窗口内完成传感器数据的采集、融合、决策与执行,对计算平台的实时通信能力提出了极高要求;具身智能机器人则需要在复杂物理环境中协调数十乃至数百个异构模块,对进程间通信的灵活性、可靠性与可扩展性同样要求极高。
在这两大产业中,中间件处于软件栈的核心枢纽位置。一个设计优良的中间件,能够将复杂的分布式通信问题屏蔽于业务逻辑之外,让开发者专注于算法与应用;反之,一个设计粗糙或与业务场景不匹配的中间件,则会成为制约系统性能、扩展性与可维护性的瓶颈。
然而,当前主流中间件——无论是以 ROS2 为代表的机器人领域通用框架,还是以 Fast-DDS、CycloneDDS 为代表的工业级 DDS 实现,亦或是以 vsomeip 为代表的车载以太网协议栈——都不同程度地存在 API 复杂、传输绑定、调试工具链缺失、国产化程度低等问题。
VLink 正是在这一背景下诞生的。它是一个以 Apache 2.0 协议开源的轻量级 C++17 通信中间件,面向自动驾驶与具身智能场景,以"一套 API,多种传输,切换零代价"为核心设计哲学。它从实践问题出发,将工程师真实遭遇的痛点一一转化为设计约束,构建出一套兼顾性能、灵活性、易用性与工程完整性的通信基础设施。
本文旨在对 VLink 的产生背景、核心设计、技术特性与工程价值进行全面的学术论述。文章不仅关注技术层面的创新,更着眼于 VLink 对整个领域工程实践的推动意义,以及在国产化背景下的战略价值。
自动驾驶技术的商业化进程在过去数年间显著加速。以特斯拉 FSD(Full Self-Driving)、百度 Apollo、华为 ADS 为代表的量产自动驾驶系统,已经从实验室走向了公共道路。L2+ 级别的辅助驾驶功能在量产车型中的普及率持续提升,L3 级别的量产方案也逐步进入法规认证阶段(具体渗透率数据因统计口径与机构不同而差异较大,相关数字请参考各行业机构公开发布的最新报告)。
从技术架构上看,现代自动驾驶系统通常包含以下核心子系统:感知(相机、LiDAR、毫米波雷达、超声波),定位(高精度地图 + IMU + GNSS),预测(行人、车辆行为预测),规划(路径与速度规划),控制(横向、纵向执行),以及监控与诊断(OBD、SOC、安全监控)。这些子系统往往分布于多个异构计算节点上,彼此之间通过进程间通信进行数据交换。
以典型的 L3 自动驾驶系统为例,其 IPC 消息流量在常见配置下可能包含多路高分辨率相机(原始帧率约 30 fps,单路原始数据量可达数十至上百 MB/s 数量级)、数台 LiDAR(每秒产生 MB 级点云数据)、若干毫米波雷达与超声波传感器(数据量相对较小),以及模块间传递的感知结果(检测框、语义分割,频率 20–100 Hz)、规划结果(频率约 10–20 Hz)与控制指令(频率 100 Hz 至 1 kHz 量级)。具体数值因车型配置与传感器型号而异,此处仅用于说明数量级。
在如此高密度的数据流量下,中间件的零拷贝能力、延迟确定性以及资源占用就成为系统设计的关键约束。
以大型语言模型(LLM)与视觉-语言-动作模型(VLA)为核心的具身智能,是 2024-2026 年人工智能领域最具爆发力的方向之一。以特斯拉 Optimus、Figure AI、智元机器人、宇树科技为代表的人形机器人公司,正以惊人速度推进硬件迭代与软件栈的构建。
具身智能系统对通信中间件的需求与自动驾驶有所不同,但同样苛刻:
传统工业机器人通信方案(EtherCAT、CANopen 等)专注于确定性实时性,但缺乏高级语义和数据丰富性;ROS2 虽然提供了较好的通用性,但其实时性和工程化程度仍受到诟病。
通信中间件在智能系统软件栈中处于基础层与业务层之间的关键位置,如下图所示:
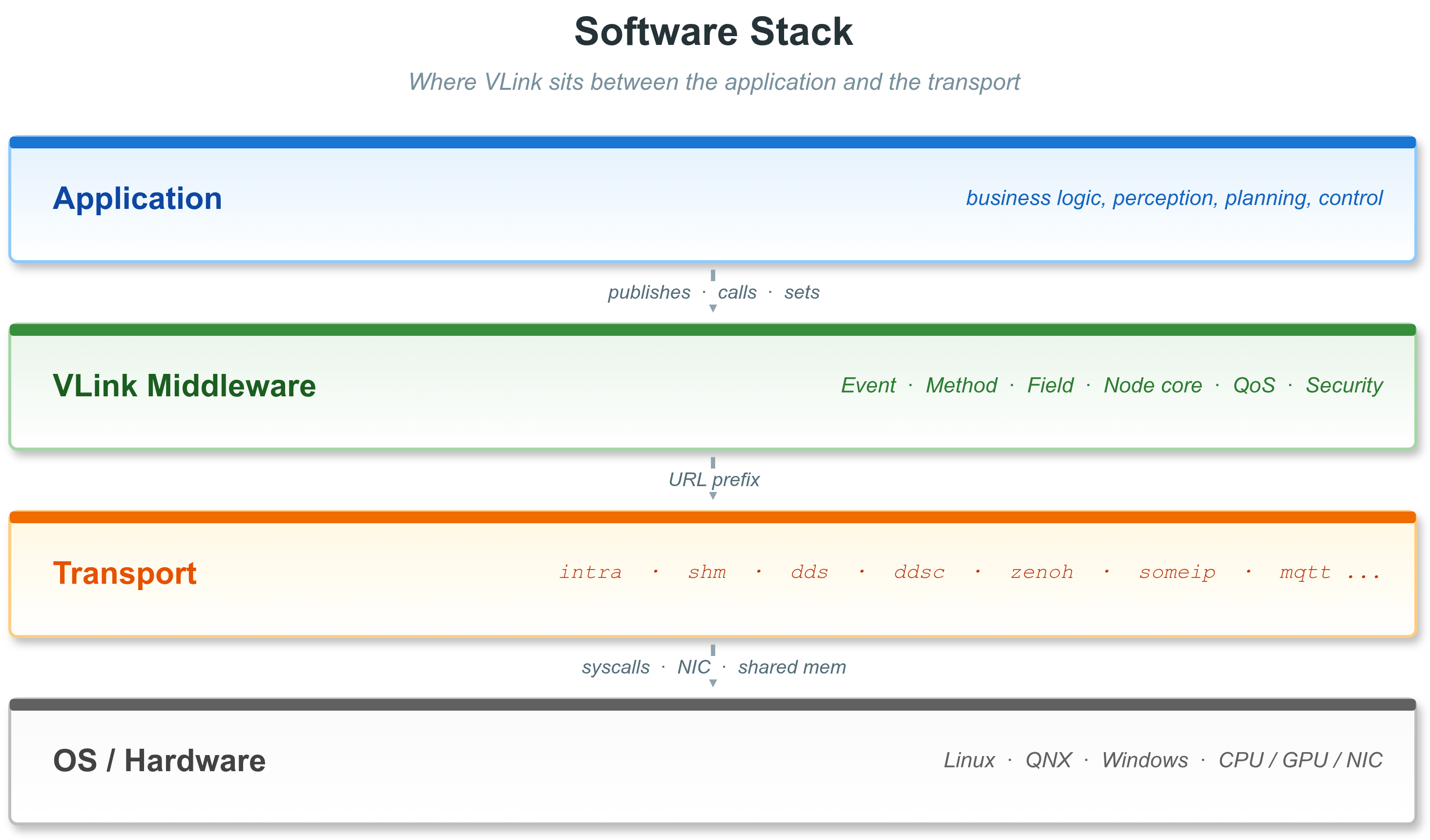
中间件的设计质量直接决定了:
ROS2 是当前机器人领域使用最广泛的中间件框架,由 Open Robotics 基于 DDS(Data Distribution Service)标准构建。其核心特性包括:
然而 ROS2 在工业应用中暴露出若干严重问题:
DDS 是 OMG(Object Management Group)制定的工业级分布式数据通信标准,其主要实现包括 eProsima Fast-DDS、Eclipse CycloneDDS、RTI Connext DDS、ADLINK OpenSplice 等。DDS 提供了完善的 QoS 策略体系和可靠的跨网络通信能力,广泛应用于国防、航空、工业自动化领域。
但直接使用 DDS 的痛点同样突出:
SOME/IP 是 AUTOSAR 标准定义的车载以太网通信协议,由 vsomeip(开源实现)提供工业实现。它面向车载 ECU 之间的服务化通信,提供服务发现、方法调用、事件通知等功能。
SOME/IP 的局限性在于:
Zenoh 是 Eclipse 基金会推出的新一代 IoT/边缘计算通信协议,以低延迟、云边协同为设计目标。其 Rust 实现具有出色的安全性和性能,并提供了 C/Python/Java 绑定。
Zenoh 的主要局限:
这是当前中间件领域最普遍的问题之一。以 ROS2 为例,其通信层硬性依赖 DDS,虽然通过 rmw(ROS Middleware Interface)层支持多种 DDS 实现,但切换 DDS 实现仍需修改编译配置、更新环境变量,且不同实现之间存在行为差异。更重要的是,切换到非 DDS 传输(如共享内存、进程内通信)需要完全不同的 API(如 intra_process_comms),无法无缝切换。
实际工程中,这种锁定带来了严重后果:
以 Fast-DDS 为例,创建一个简单的发布者需要:
这还仅是最简单的场景,不包括错误处理、生命周期管理、QoS 配置等。复杂场景下,样板代码(boilerplate)量可能高达数百行。
现有方案在序列化支持上存在明显割裂:
在实际项目中,一个团队往往同时使用 Protobuf(用于模型推理数据交换)、FlatBuffers(用于性能敏感的传感器数据)和 CDR(DDS 内部),不同序列化格式之间的转换引入了大量转换代码和额外的内存拷贝。
调试分布式通信系统历来是工程师最头疼的问题之一。现有工具的局限:
自动驾驶与机器人控制对通信延迟的确定性要求极高。"平均延迟 0.1 ms"远不如"P99 延迟 0.5 ms"有意义。现有方案的问题:
当前主流中间件均来自海外:
在当前国际形势下,核心软件基础设施依赖海外供应商,存在供应链安全风险。一旦遭遇出口管制或技术封锁,可能对国内自动驾驶产业造成严重冲击。
中国已经成为全球最大的自动驾驶市场之一。根据相关数据,2025 年中国智能网联汽车的渗透率持续攀升,头部车企(比亚迪、华为赛力斯、理想、小鹏、蔚来等)均已建立自研智驾系统研发团队,部分企业的智驾软件栈从感知到规划已实现全面自研。
在具身智能领域,智元机器人、宇树科技、开普勒机器人、傅利叶智能等国内企业正在高速迭代人形与四足机器人产品,技术积累正在赶超国际先进水平。
这一产业格局对国产通信中间件提出了历史性需求:既需要满足严苛的性能要求,又需要具备完整的自主知识产权,还需要有持续演进的开源社区支撑。
通信中间件作为自动驾驶与机器人软件栈的关键基础设施,其国产化具有以下战略意义:
**供应链安全**:核心基础软件自主可控,可从根本上规避技术封锁风险,确保产业链连续性。
**标准话语权**:在国产中间件发展壮大的过程中,中国企业有机会参与乃至主导相关行业标准的制定,争取国际标准化组织中的话语权。
**技术创新路径**:自研中间件可以根据中国智驾与机器人产业的具体需求进行定制化优化,而非受制于海外主导的技术路线。
**生态建设**:围绕国产中间件形成工具链、培训体系、社区生态,有助于整体提升国内产业的软件工程能力。
目前国内已有少量针对自动驾驶和机器人场景的通信中间件探索,但普遍存在以下不足:
VLink 的出现,是对上述不足的直接回应。作为一个 Apache 2.0 开源项目,它具备开放性、完整性与工程化程度,有望成为国产通信中间件领域的重要参考实现。
VLink 将自身定位为"自动驾驶与具身智能场景下,ROS2 的轻量级替代方案"。这一定位包含三层含义:
**第一层:面向垂直场景**。VLink 不试图成为通用的分布式计算框架,而是专注于自动驾驶与机器人领域的具体需求,在性能、实时性、传感器数据处理等方面做深度优化。
**第二层:替代而非对抗 ROS2**。VLink 并非否定 ROS2 的价值,而是在 ROS2 力不从心的场景(高性能、强实时性、传输灵活切换、工程化工具链)提供更好的选择。在可以与 ROS2 共存的场景下,VLink 也提供桥接能力。
**第三层:轻量化**。VLink 的核心库无需配置守护进程(daemon),除 shm 传输需要 Iceoryx RouDi 外,其余传输均无额外进程依赖,极大降低了部署复杂度。
VLink 的设计遵循以下核心原则:
**原则一:一套 API,多种传输**。用户使用统一的 Publisher<T>、Subscriber<T>、Client<Req, Resp>、Server<Req, Resp>、Getter<T>、Setter<T> 接口,通过改变 URL 前缀(intra://、shm://、dds:// 等)即可切换传输后端,业务代码零修改。
**原则二:类型安全优先**。借助 C++17 模板元编程,所有通信原语在编译期确定消息类型、序列化方式,错误在编译期暴露,而非运行时崩溃。
**原则三:零开销抽象**。设计上避免虚函数分派和动态分配的关键路径开销。对于编译期可确定的特性(如是否有响应、序列化类型),使用 if constexpr 和 static_assert 而非运行时分支。
**原则四:工具链完整性**。从开发到调试再到生产部署,提供完整的工具链支持,而非仅提供通信原语本身。
**原则五:安全性内建**。加密通信不是事后添加的补丁,而是通过模板参数 SecurityType 在编译期确定,与正常通信共用同一套 API。
目标用户:
典型应用场景:
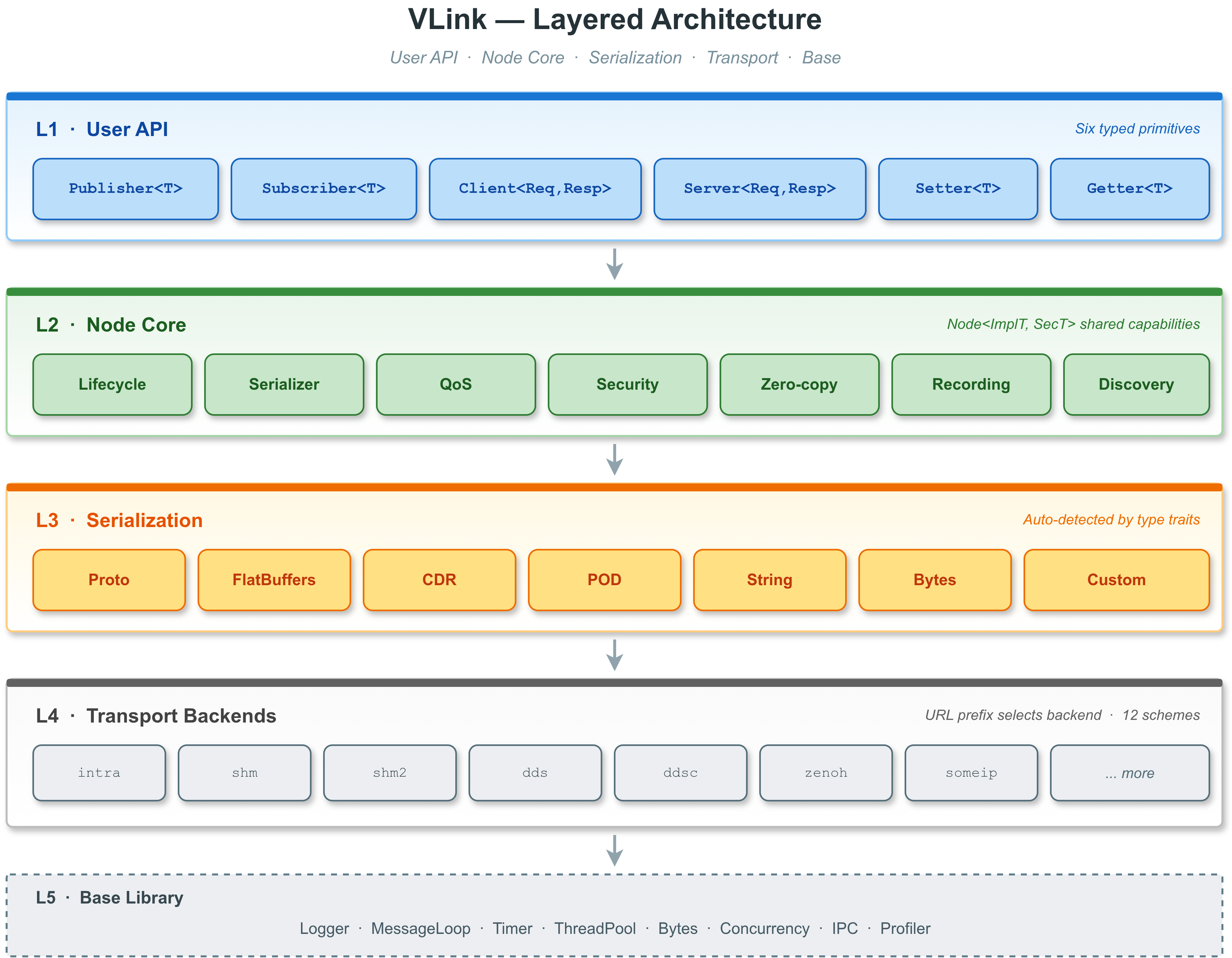
VLink 采用分层架构设计,自上而下分为用户 API 层、通信原语层、序列化层、节点实现层、传输后端层和基础组件层。
VLink 提供三种通信模型,覆盖智能系统中绝大多数的通信场景:
详细 API 请参阅 Event 模型(Publisher / Subscriber)。
事件模型是经典的发布-订阅(Publish-Subscribe)模式,适用于数据流驱动的场景。
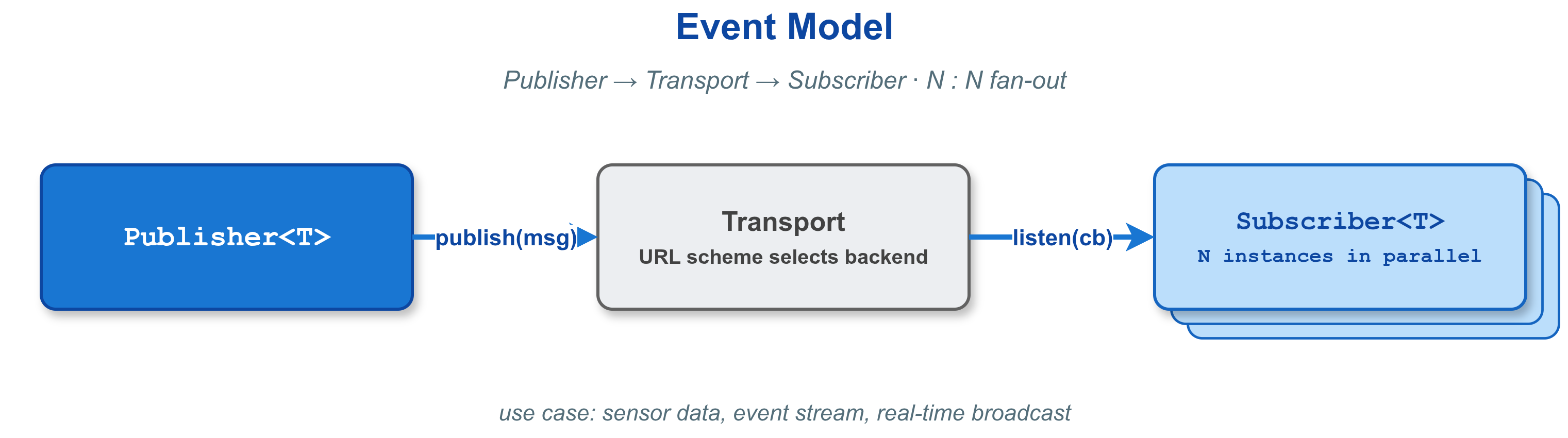
关键特性:
典型应用: 感知结果发布、规划结果分发、传感器数据广播
详细 API 请参阅 Method 模型(Client / Server)。
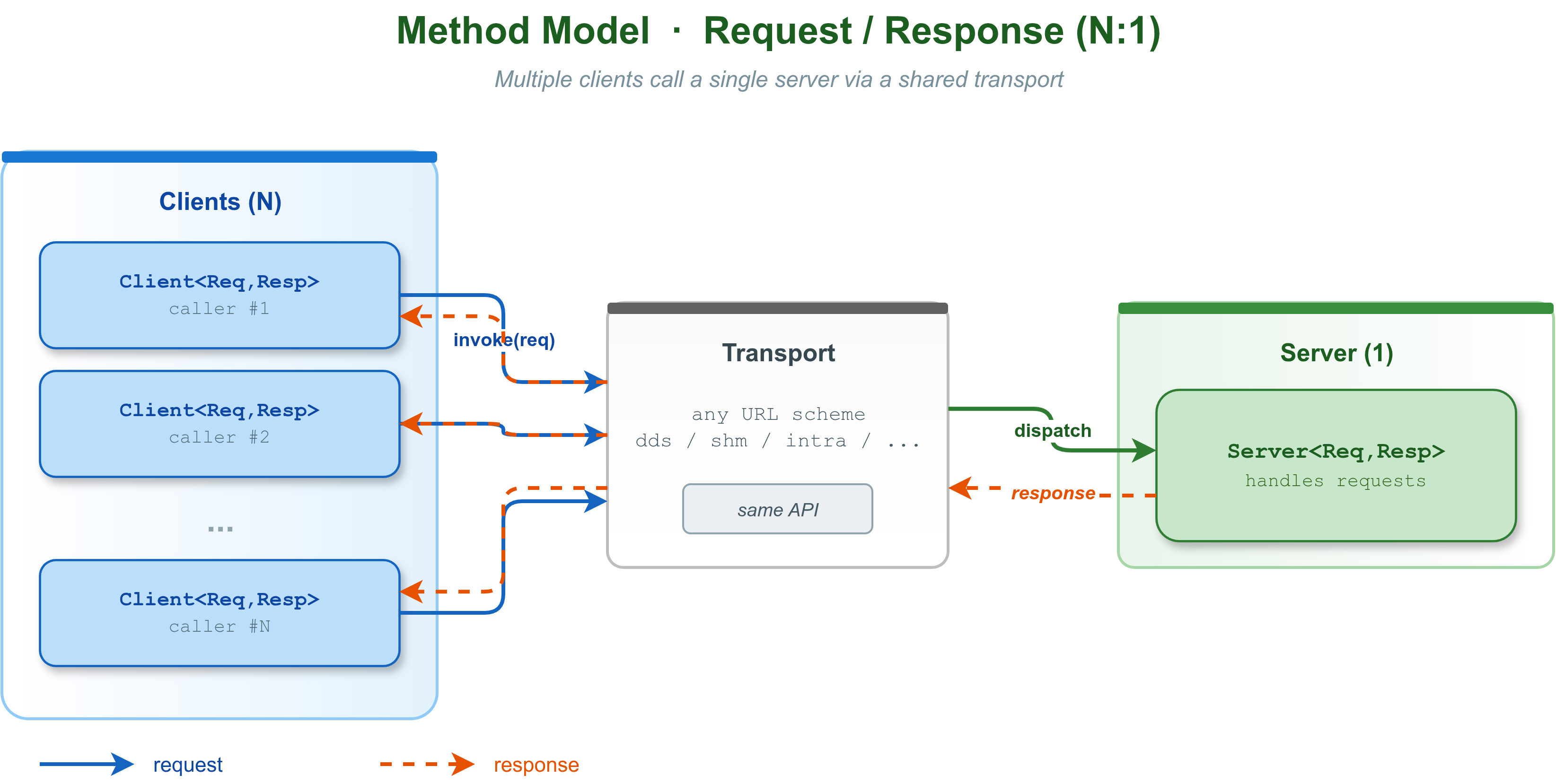
方法模型是请求-响应(Request-Response)模式,对应远程过程调用(RPC),适用于需要返回值的服务调用场景。
五种调用方式:
| 方式 | 签名 | 是否阻塞 | 说明 |
|---|---|---|---|
| invoke(引用) | invoke(req, resp&, timeout) | 是 | 最简单,适合同步场景 |
| invoke(optional) | invoke(req, timeout) -> optional<Resp> | 是 | 超时返回 nullopt |
| invoke(回调) | invoke(req, RespCallback) | 否 | 异步,回调通知 |
| async_invoke | async_invoke(req) -> future<Resp> | 否 | std::future 等待结果 |
| send | send(req) | 否 | 仅当 RespT=EmptyType |
典型应用: 地图查询、参数获取、障碍物信息请求、远程配置变更
详细 API 请参阅 Field 模型(Setter / Getter)。
字段模型是状态同步(State Sync)模式,保持"最新值"语义,适用于配置参数、系统状态等场景。
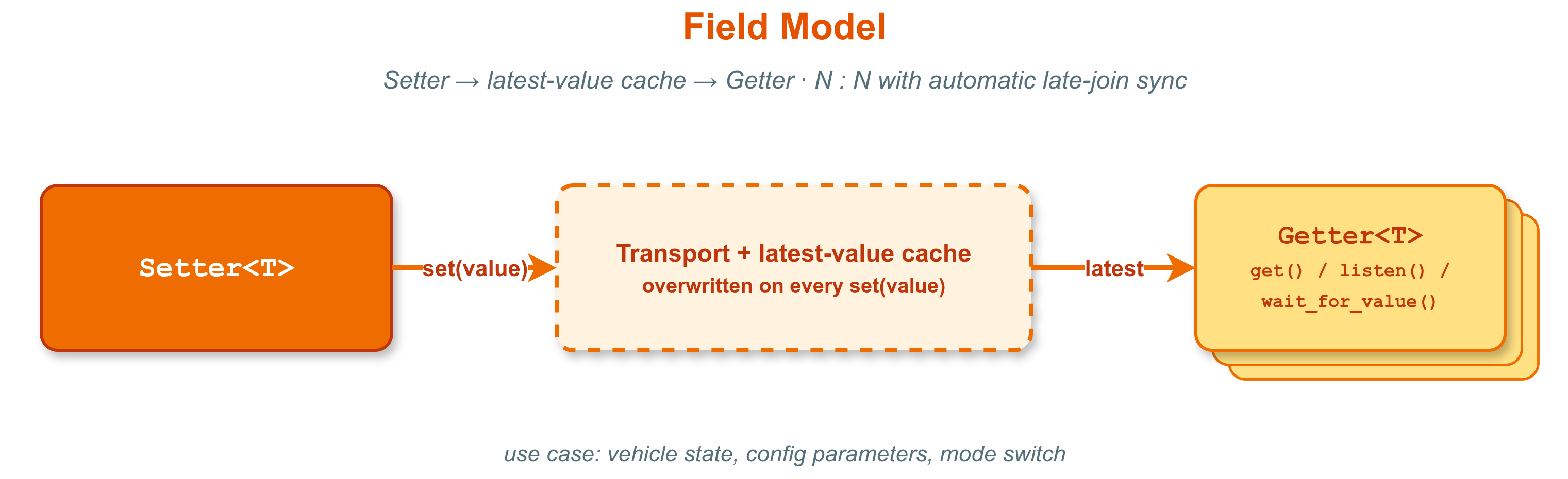
字段模型与事件模型的关键区别在于:
典型应用: 车辆状态(速度、档位)、系统配置参数、传感器标定参数
VLink 通过 URL 前缀选择传输后端,同一套业务代码可以在不同传输协议之间无缝切换:
稳定后端(推荐用于生产环境):
| Transport | 底层技术 | 通信范围 | 零拷贝 | 实时性 | 典型场景 |
|---|---|---|---|---|---|
| intra:// | 内置消息队列 | 进程内 | 是 | 极高 | 同进程模块间高频数据传递 |
| shm:// | Iceoryx RouDi | 同机跨进程 | 是 | 极高 | 相机/LiDAR 数据零拷贝传输 |
| dds:// | Fast-DDS RTPS | 跨机器/局域网 | 否 | 高 | 多 ECU 协同、跨域通信 |
| ddsc:// | CycloneDDS | 跨机器/局域网 | 否 | 高 | 轻量级跨机通信 |
Beta 后端(实验性,API 可能变化):
| Transport | 底层技术 | 通信范围 | 零拷贝 | 实时性 | 典型场景 |
|---|---|---|---|---|---|
| shm2:// | Iceoryx2 | 同机跨进程 | 是 | 极高 | 次代共享内存方案 |
| ddsr:// | RTI Connext DDS | 跨机器 | 否 | 高 | 高可靠性工业级场景 |
| ddst:// | TravoDDS(国产 DDS) | 跨机器 | 否 | 中 | 国产自主可控 DDS 替代方案 |
| zenoh:// | Zenoh 协议 | 跨机/云边 | 否 | 高 | IoT 边缘节点通信 |
| someip:// | vsomeip SOME/IP | 车载以太网 | 否 | 高 | 车载 ECU 服务化通信 |
| fdbus:// | FDBus IPC | 同机 | 否 | 高 | Android/Linux 混合系统 |
| mqtt:// | MQTT (Paho C) | 跨网络/云端 | 否 | 中 | IoT 传感器桥接、云端消息 |
| qnx:// | QNX IPC | 同机(QNX) | 否 | 极高 | QNX 实时系统内部通信 |
每种传输后端通过独立的 *Conf 结构体进行配置,支持通过 URL 参数传递后端特定选项(如 DDS 的 ?domain=1&depth=10)。URL 解析由 Url 类统一处理,Node 基类在初始化时自动根据 transport 类型选择对应的传输工厂。
序列化是通信中间件性能的关键瓶颈之一。VLink 通过编译期静态分派实现了对 14 种序列化类型的统一支持,而无需运行时类型判断的开销:
| 类型常量 | 对应 C++ 类型 | 适用场景 |
|---|---|---|
| kBytesType | Bytes(128 字节对象,96 字节内联栈存储) | 原始字节传递,自定义序列化 |
| kDynamicType | 动态类型容器 | 运行时确定类型的场景 |
| kCdrType | FastDDS CDR 消息 | DDS 原生 CDR 序列化 |
| kProtoType | google::protobuf::MessageLite | Protobuf 编码 |
| kProtoPtrType | MyProto*(原始指针,Arena 管理) | Protobuf Arena 减少拷贝 |
| kFlatTableType | MyTableT(NativeTable 派生) | FlatBuffers Object API |
| kFlatPtrType | const MyTable*(指向 Table 子类的指针) | FlatBuffers 零拷贝只读访问 |
| kFlatBuilderType | 含 fbb_ 成员 + Finish() 的结构体 | FlatBuffers Builder 模式 |
| kCustomType | 实现 operator>>(Bytes&) const / operator<<(const Bytes&) 的类型 | 自定义序列化协议 |
| kStringType | std::string | 字符串消息 |
| kCharsType | char[] / const char* | C 字符串 |
| kStreamType | 流式数据 | 流式传输场景 |
| kStandardType | POD 类型(int、float、结构体等) | 简单数据类型,直接内存拷贝 |
| kStandardPtrType | T*(指向 POD 类型的原始指针) | 零拷贝 POD 指针传递 |
类型检测通过编译期模板推导完成:
对于需要自定义序列化的类型,只需实现 operator>> 和 operator<< 运算符(与 Bytes 类型交互):
详细的生命周期状态机与 Node 基类 API 请参阅 节点基类与生命周期。
所有通信原语继承自 Node<ImplT, SecT> 基类,共享统一的生命周期管理:
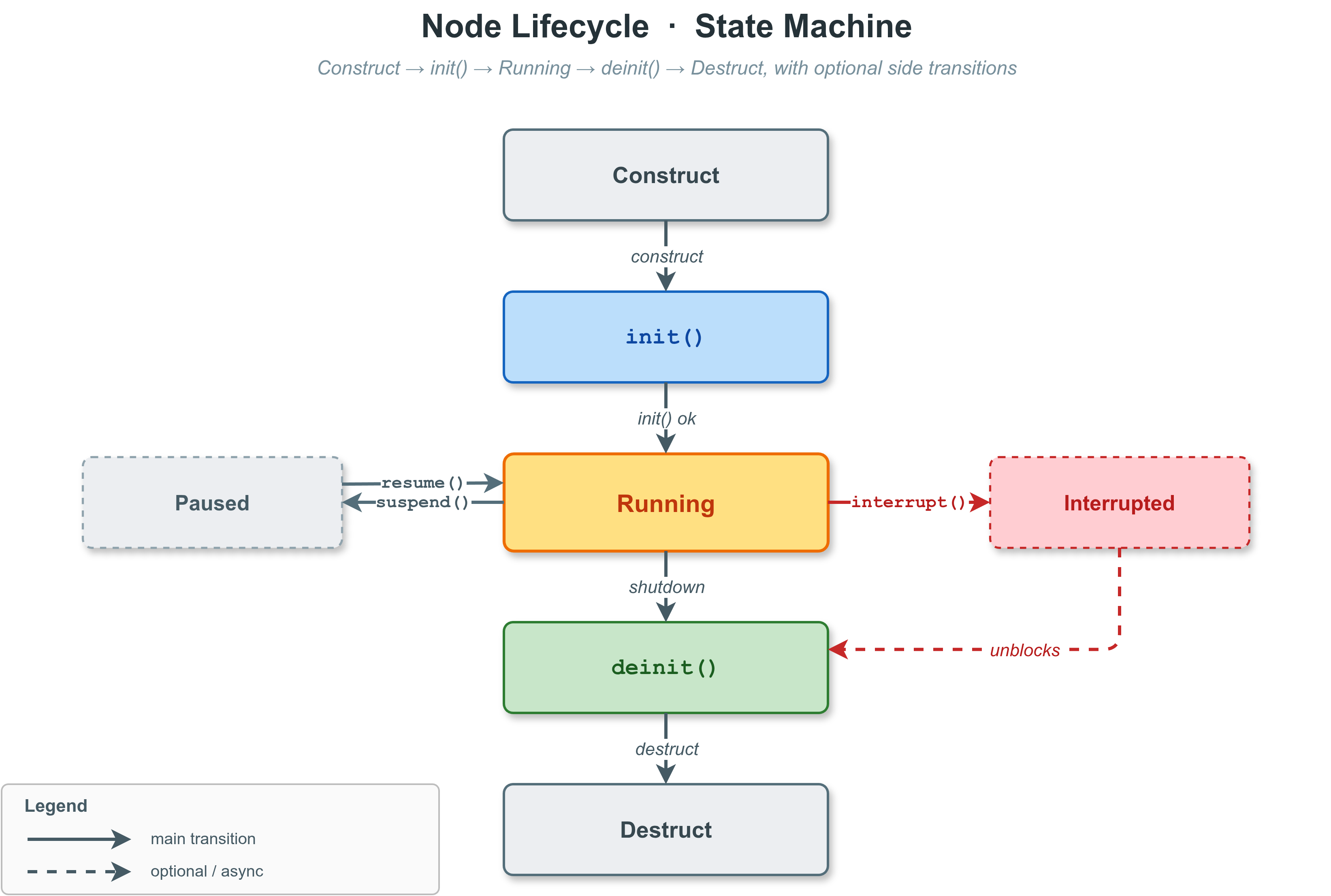
Node 基类提供以下通用能力:
VLink 内置了一套面向嵌入式与高性能场景精心设计的基础组件库(include/vlink/base/),既为上层通信框架提供核心支撑,也可在用户代码中独立使用。这些组件的设计目标是:在保证 C++17 可移植性的前提下,尽可能减少动态内存分配、系统调用开销与锁竞争,满足自动驾驶与机器人系统对低延迟和确定性的要求。
MessageLoop(消息循环)
MessageLoop 是 VLink 整个任务调度体系的核心抽象。它是一个单线程的串行事件处理器,在不阻塞调用者的前提下,将任务排队到事件循环中异步执行,确保事件处理的顺序性和线程安全性。
队列类型:
空闲策略:
任务投递接口:
MessageLoop 运行在独立线程中时,可通过 vlink::Utils 提供的线程工具函数设置 CPU 亲和性,在实时嵌入式系统中将其固定在特定 CPU 核心上,进一步降低线程调度带来的延迟不确定性。
ThreadPool(线程池)
ThreadPool 提供固定大小的多线程并发执行器,所有工作线程共享一个任务队列:默认队列类型为 kNormalType(互斥锁保护的 std::queue),kLockfreeType 切换为 MPMC 无锁队列以降低高竞争场景下的入队/出队开销;空闲策略与 MessageLoop 同名(kOptimizationStrategy / kPopStrategy / kBlockStrategy),分别在唤醒延迟和 CPU 占用之间做不同折中。ThreadPool 不内嵌 MessageLoop,没有定时器/事件循环生命周期,仅提供 post_task / invoke_task 两类提交接口,适用于 CPU 密集型的并行处理任务,如批量图像预处理、多帧点云合并、并行路径规划评估等场景。
Timer / WheelTimer / ElapsedTimer(定时器家族)
VLink 提供三种不同用途的定时器:
GraphTask(有向无环图任务调度器)
GraphTask 是面向感知融合、多模态预处理等复杂数据处理 pipeline 的专用调度器。它接受一组任务节点和节点间的依赖关系声明,自动构建 DAG(有向无环图),并在运行时最大化并行度——所有没有未完成前驱节点的任务可以同时在 ThreadPool 中并行执行。
这一模型将并行化决策从业务代码中剥离,开发者只需声明数据依赖关系,框架自动管理并发。
Logger(日志系统)
VLink 的 Logger 是全局单例日志系统,支持四种日志书写风格以适应不同团队的代码习惯:
日志级别:kTrace / kDebug / kInfo / kWarn / kError / kFatal / kOff(共 7 级,通过 VLINK_LOG_LEVEL 环境变量在运行时调整,其中 kOff 表示完全关闭日志输出)
后端适配器(通过编译选项 SELECT_LOG_BACKEND 切换):
所有后端实现完全透明切换,业务代码中的日志调用不需要任何修改。
Bytes(字节缓冲区)
Bytes 是 VLink 内部统一的字节数据容器,总大小为 128 字节,采用 SBO(Small Buffer Optimization)设计,内含 96 字节的栈内联存储(kStackSize = 96)与元数据,超过 96 字节时溢出到内存池或系统堆。Bytes 支持五种所有权模式(create 拥有 / shallow_copy 非拥有别名 / deep_copy 拥有副本 / loan_internal 借贷 / shallow_copy_ptr 不透明指针包装),详见 include/vlink/base/bytes.h:42-48 与 基础库 – Bytes,并额外提供:
在框架内部,所有跨模块的序列化数据传递均通过 Bytes 进行,其轻量级别名机制确保了高效的数据传递。
其他实用组件
| 组件 | 说明 |
|---|---|
| Semaphore | 基于条件变量的计数信号量,提供 wait()/signal() 接口 |
| SpinLock | 自旋锁,适用于极短临界区(预期等待时间 < 1μs) |
| MpmcQueue<T> | MPMC 无锁多生产者多消费者队列,内部用于 kLockfreeType MessageLoop |
| ObjectPool<T> | 对象池,减少频繁构造/析构开销,用于内部消息缓冲区管理 |
| Plugin | 动态库(<tt>.so)插件加载器,用于传输后端的动态加载 |
| NameDetector | 进程名与线程名检测工具,用于 DiscoveryViewer 的进程识别 |
| CachedTimestamp | 缓存时间戳,以可配置的时间间隔刷新系统时钟读取,降低高频调用的系统调用开销 |
| DeadlineTimer | 截止时间定时器,用于操作超时管理 |
| FastStream | 高性能字符串流,替代 std::ostringstream 用于格式化日志消息 |
| Utils | 通用工具函数集(字符串处理、环境变量读写、文件路径操作等) |
这是 VLink 最核心的设计目标,也是对行业痛点最直接的回应。
**问题**:开发阶段使用进程内通信(性能好,方便调试),测试阶段使用共享内存(接近生产环境),生产阶段根据部署拓扑使用 DDS 或 SOME/IP。每次切换都需要修改大量代码。
**VLink 的解决方案**:URL 前缀即传输协议,业务代码零修改。
这五行代码的业务逻辑完全相同,唯一的变化是 URL 前缀。其中 intra://、shm://、dds:// 为稳定后端,someip:// 和 zenoh:// 目前为 Beta 状态。在大型系统中,传输协议的选择可以通过配置文件动态注入,实现真正意义上的"零代码修改切换"。
VLink 将消息类型作为模板参数,在编译期建立类型与序列化方式的绑定,错误提前暴露:
这种"编译期验证"的设计哲学,将大量运行时错误前移到编译期,显著提升了大型项目的开发质量。
VLink 将 Iceoryx 的 loan/unloan 机制封装为通用接口,使零拷贝使用变得简单:
对于 intra:// 传输,当消息类型为 std::shared_ptr<IntraData> 子类时,VLink 内部通过共享指针直接转发数据,利用引用计数实现进程内零拷贝:
VLink 通过 Serializer 命名空间在编译期完成序列化方式的静态分派,框架内部自动调用正确的序列化路径:
这一能力在消息录制(BagWriter)中得到了直接应用——无论节点使用何种序列化格式,都可以将原始字节流统一存储,并在回放时按原格式解码。
VLink 将安全加密作为模板参数,与正常通信完全同构:
安全加密的透明集成意味着:在不同安全等级的部署场景下(如开发环境不加密、生产环境加密),只需切换类型别名,而无需修改任何业务逻辑。
VLink 的用户接口设计追求"最短的正确路径"。以下展示了使用 VLink 完成一个完整的发布-订阅场景所需的代码量:
发布者(5 行有效代码):
订阅者(4 行有效代码):
与等效的 Fast-DDS 原生实现相比,VLink 的代码量显著减少(典型的发布-订阅样例从数十行缩减到个位数行),且无需任何配置文件或代码生成步骤(对于 POD 类型和 Protobuf 类型)。具体节省的行数因业务复杂度和 QoS 配置要求而异。
VLink 在关键路径上进行了多项性能优化:
**编译期分派**:通过 if constexpr 和模板特化,序列化类型的判断在编译期完成,运行时无分支。
**无锁数据结构**:在性能敏感的场景下,MessageLoop 的 kLockfreeType 队列基于 MPMC(多生产者多消费者)无锁算法实现,避免了互斥锁竞争。
**对象池**:频繁分配的内部对象(如消息缓冲区)通过对象池(object_pool.h)管理,减少了动态内存分配的开销。
**零拷贝优先**:在 shm:// 和 intra:// 传输上,数据路径完全避免内存拷贝,端到端延迟达到微秒级。
**CPU 亲和性**:MessageLoop 的工作线程支持 CPU 亲和性配置,保证关键线程的 CPU 局部性。
VLink 提供了与 DDS 标准兼容的完整 QoS 策略体系,并对非 DDS 传输的可用子集进行了合理映射:
DDS 传输会将 QoS 属性完整映射到底层 DDS 实体;SHM 传输则使用 URL 中的 depth 参数配置环形缓冲区深度;intra 传输使用属性中的 priority 参数配置任务派发优先级。
VLink 不仅是一个通信库,更提供了面向工程实践的完整工具链(详见第 12 章),包括消息录制(BagWriter)、实时发现监控(DiscoveryViewer)、CLI 工具、性能剖析器(CpuProfiler)、完整的日志系统,以及面向 Web 端的 WebViz 可视化桥接工具集(Foxglove Studio 和 Rerun Viewer 双后端支持)。
VLink 提供了多层语言互操作能力:
**C API(c_api.h)**:面向六大通信原语(Publisher / Subscriber / Client / Server / Setter / Getter)数据面的纯 C 接口,使用不透明句柄(opaque handle)设计,可被 Python、Go、Java 等任何支持 C FFI 的语言调用。QoS、Security、Bag 等高级特性不在 C API 的覆盖范围内,需要通过 C++ API 使用。
**Proxy API(proxy_api.h)**:面向代理进程的监控接口,用于在不修改业务进程代码的情况下对通信流量进行旁路监控。
**零拷贝数据容器(zerocopy/)**:提供 CameraFrame、PointCloud、RawData 等领域特定的零拷贝容器,支持从 C 语言直接访问数据指针。
ROS2 是目前机器人与自动驾驶领域使用最广的中间件框架,VLink 在以下维度与之进行对比:
通信延迟
ROS2 在进程间通信时,即使使用 intra-process 优化,也需要经过 rmw 层的分发,存在额外开销。在高频场景(1 kHz+)下,ROS2 的延迟抖动(jitter)较大。VLink 的 intra:// 传输直接绕过所有中间层,延迟仅为函数调用开销;shm:// 传输利用 Iceoryx 的真零拷贝,与 ROS2 的最优配置相比延迟更低。
API 复杂度
ROS2 要求使用 rclcpp::Node 基类,节点必须在 ROS 执行器(Executor)中运行,引入了 spin 机制、节点生命周期管理、executor 类型选择等概念。VLink 的 API 不依赖任何框架层,可以在任意线程模型中使用,与 std::thread、boost::asio、自定义事件循环等无缝配合。
序列化支持
ROS2 使用 .msg 格式定义消息类型,序列化为 CDR,与 Protobuf/FlatBuffers 的集成需要手动封装。VLink 原生支持 14 种序列化格式,无需格式转换。
传输灵活性
ROS2 通过 rmw 层支持多种 DDS 实现,但切换需要重新编译并更新环境变量,且传输协议种类有限(主要为 DDS)。VLink 通过 URL 前缀支持 12 种传输后端,切换无需重新编译。
依赖规模
ROS2 的完整安装包含数十个 packages,依赖 Python、CMake、ament_cmake 等大量工具链,二进制体积较大。VLink 的核心库依赖极少,可裁剪到 1 MB 以内的静态库形式部署到嵌入式平台。
可视化与 Web 远程调试
ROS2 生态中有 foxglove_bridge 项目可将 ROS2 数据桥接到 Foxglove Studio,但属于第三方社区维护,且不支持 Rerun。VLink 原生内置了 WebViz 工具集(vlink-foxglove + vlink-rerun),同时支持 Foxglove Studio 和 Rerun Viewer 两大 Web 可视化平台,并提供 vlink-bag2mcap / vlink-bag2rrd 离线转换工具,实现"实时 + 离线"双路径的 Web 可视化覆盖。
API 易用性
独立 DDS(Fast-DDS、CycloneDDS 等)的原生 API 极为复杂,创建一个发布者需要管理 DomainParticipant、Publisher、Topic、DataWriter 等多个对象,任何一步出错都可能导致资源泄漏或行为异常。VLink 将这一切封装为一行代码,且通过 RAII 自动管理生命周期。
传输迁移成本
独立 DDS 方案一旦选定,更换 DDS 实现(如从 Fast-DDS 迁移到 CycloneDDS)需要重新学习新 API 并修改大量代码。VLink 用户只需修改 URL 前缀(dds:// 改为 ddsc://),业务逻辑代码零修改。
同机性能
独立 DDS 在同机进程间通信时仍需经过网络栈(或使用特定的 SHM 扩展,需额外配置)。VLink 可以在同机场景自动选择 shm:// 传输,享受真零拷贝的性能优势,同时对外提供与 DDS 完全相同的 API。
SOME/IP 是车载以太网的核心通信协议,VLink 在 someip:// 传输后端下兼容 SOME/IP 协议,可与现有车载 ECU 进行互通。
对比维度:
Zenoh 是新兴的云边一体通信协议,VLink 在 zenoh:// 后端下兼容 Zenoh 协议。
对比维度:
下表中,"支持"表示原生提供该能力,"部分"表示通过扩展、插件或实验特性提供,"不支持"表示框架本身不提供:
| 评估维度 | VLink | ROS2 | Fast-DDS | SOME/IP | Zenoh |
|---|---|---|---|---|---|
| 多传输后端支持 | 支持(12 种 scheme) | 部分(以 DDS 为主) | 不支持(仅 DDS) | 不支持(仅 SOME/IP) | 部分 |
| 极简 API | 支持 | 部分(需继承 Node) | 不支持(API 复杂) | 不支持(协议复杂) | 支持 |
| 零拷贝支持 | 支持(shm / intra) | 部分(intra-process) | 部分 | 不支持 | 部分(实验性) |
| 多序列化格式支持 | 支持(14 种) | 部分(CDR 为主) | 部分(CDR) | 不支持 | 不支持(raw bytes) |
| 实时性保障 | 支持 | 部分 | 支持 | 支持 | 支持 |
| 调试工具链 | 支持 | 支持(生态丰富) | 部分 | 部分 | 部分 |
| Web 可视化集成 | 支持(Foxglove+Rerun) | 部分(foxglove_bridge) | 不支持 | 不支持 | 不支持 |
| 安全加密 | 支持(模板参数透明) | 支持(DDS-Security) | 支持 | 部分 | 支持 |
| 自主可控与开源协议 | 支持(Apache 2.0 国内) | 不适用(美国主导项目) | 不适用(西班牙) | 不适用(德国主导) | 不适用(Eclipse) |
| 跨传输后端零代码切换 | 支持 | 不支持 | 不支持 | 不支持 | 不支持 |
| 学习曲线 | 低(API 极简) | 中等 | 高(API 复杂) | 高(协议复杂) | 中等 |
| 生产案例成熟度 | 早期 | 成熟(ROS 生态) | 成熟(工业验证) | 成熟(车规验证) | 成长中 |
| 嵌入式 / 可裁剪 | 支持 | 部分(依赖较多) | 部分 | 部分 | 支持(zenoh-pico) |
| 多语言支持 | 支持(C API + Python) | 支持(rclpy / rclcpp) | 部分 | 不支持 | 支持(Rust/C/Py) |
VLink 在 shm:// 传输上依托 Iceoryx 实现了业界领先的零拷贝性能。Iceoryx 是 Eclipse 基金会的开源项目,在 Bosch 的实际量产车辆中已经过验证,其共享内存管理机制将消息传递的内存操作减少到仅有指针转移:
理论分析:
对于 1920x1080 NV12 格式的相机帧(约 3 MB):
在实际测量中,Iceoryx 的进程间通信延迟可低至 10 微秒量级,与本地函数调用相比的额外开销极小。
不同序列化格式的性能特性对比(以 1 KB 消息为基准):
| 序列化格式 | 编码开销 | 解码开销 | 内存开销 | 适用场景 |
|---|---|---|---|---|
| kStandardType(POD) | 极低(memcpy) | 极低 | 极低 | 简单数据类型,如控制指令 |
| kBytesType | 零(直传) | 零 | 低 | 原始二进制数据 |
| kFlatTableType | 低 | 极低(零解码) | 低 | 随机访问场景 |
| kProtoType | 中 | 中 | 中 | 通用结构化数据 |
| kCdrType | 低 | 低 | 中 | DDS 原生场景 |
| kCustomType | 取决于实现 | 取决于实现 | 取决于实现 | 特殊需求 |
VLink 通过编译期类型检测自动选择最优路径。对于 POD 类型(如 int、float、简单结构体),序列化实际上退化为 memcpy,开销极小。
VLink 的延迟特性取决于所选传输后端:
吞吐量特性:
对于大数据量传输(如 4K 相机帧,约 12 MB/帧,30 fps = 360 MB/s):
以下场景展示了 VLink 跨传输后端切换对延迟的影响,以一个感知-规划通信链路为例:
在实际的自动驾驶系统中,将感知与规划从同机部署切换到异机部署,只需修改 URL 前缀,VLink 自动适配传输语义,业务代码保持不变。
以一个新工程师接入现有系统为例,基于 VLink 的接入路径如下:
第一步:添加依赖(CMakeLists.txt)
第二步:引入头文件
第三步:创建通信节点(5-10 行代码)
整个接入过程无需理解传输层细节、无需配置文件、无需代码生成步骤(对于 POD 类型和 Protobuf)。
与等效的 ROS2 实现相比,VLink 的接入代码量明显更少:ROS2 通常需要 Node 类定义、create_publisher / create_subscription 注册、Executor spin 驱动等一组样板结构,而 VLink 仅靠 Publisher<T> / Subscriber<T> 两行声明即可完成基础链路。具体节省程度因业务功能复杂度而异,需以实际项目衡量。
VLink 的模板设计提供了强力的编译期保护:
这种"编译期即错误"的设计显著减少了调试时间,提高了代码质量。
VLink 提供了两种初始化策略,适应不同的代码组织需求:
立即初始化(kWithInit,默认):
延迟初始化(kWithoutInit):
这种设计使得在初始化之前可以配置所有参数(安全密钥、发现开关、序列化类型等),避免了参数设置与初始化之间的竞态条件。
VLink 提供两种多语言集成方式:**原生 Python 绑定** 和 **C API(FFI)**,确保全部 6 个通信原语对非 C++ 语言同样可用。
VLink 提供基于 nanobind 的原生 Python 模块(底层 _vlink_nanobind,顶层入口 vlink),直接暴露与 C++ 一致的 API 设计,无需手动处理 ctypes 或内存管理。该 Python 绑定为可选构建项(ENABLE_PYTHON_API,默认关闭),需要在构建时显式开启:
Python API 覆盖范围:全部 6 个通信原语、MessageLoop、Timer、ThreadPool、Logger、Process、BagWriter/BagReader、DiscoveryViewer、QoS、Security、UrlRemap 等。
对于不支持 C++ 直接绑定的语言(Go、Rust、Java、Lua 等),VLink 提供稳定 ABI 的 C 封装层:
| 功能 | C++ | Python API | C API |
|---|---|---|---|
| Publisher / Subscriber | ✅ | ✅ | ✅ |
| Client / Server(RPC) | ✅ | ✅ | ✅ |
| Setter / Getter | ✅ | ✅ | ✅ |
| 全部 12 种传输后端 | ✅ | ✅ | ✅ |
| MessageLoop / Timer | ✅ | ✅ | — |
| BagWriter / BagReader | ✅ | ✅ | — |
| DiscoveryViewer | ✅ | ✅ | — |
| Security(AES 加密) | ✅ | ✅ | — |
| Go / Rust / Java FFI 兼容 | — | — | ✅ |
详见 C API 文档。
这使得 Python 机器学习工程师可以直接与 C++ 自动驾驶系统进行数据交换,而无需编写任何 C++ 代码;Go / Rust 开发者则可通过 C API 的 FFI 接口无缝接入 VLink 通信体系。
完整的构建选项、Conan 集成、交叉编译指南请参阅 构建指南。
VLink 提供了完善的 CMake 包配置支持,find_package(vlink) 后所有目标与代码生成函数即刻可用,接入成本极低。
最简集成(加载所有传输后端):
按需加载特定传输后端:
COMPONENTS all 等价于依次加载 intra;shm;shm2;zenoh;dds;ddsc;ddsr;ddst;someip;fdbus;mqtt;qnx,对每个组件调用 find_package(vlink-<component> CONFIG QUIET)。若某后端的依赖库(如 Iceoryx、Fast-DDS)未安装,该组件会被静默跳过,不影响其他后端。
可用 CMake 目标一览:
| 目标名称 | 含义 |
|---|---|
| vlink::vlink | VLink 核心库(不含任何传输后端) |
| vlink::all | 核心库 + 所有可用传输后端的聚合目标 |
| vlink::intra | 进程内传输(随核心库内建,无额外依赖) |
| vlink::shm | Iceoryx 共享内存后端 |
| vlink::shm2 | Iceoryx2 共享内存后端 |
| vlink::dds | Fast-DDS RTPS 后端 |
| vlink::ddsc | CycloneDDS 后端 |
| vlink::zenoh | Zenoh 协议后端 |
| vlink::ddsr | RTI Connext DDS 后端 |
| vlink::ddst | TravoDDS 后端 |
| vlink::someip | SOME/IP(vsomeip)后端 |
| vlink::fdbus | FDBus IPC 后端 |
| vlink::mqtt | MQTT (Paho C) 后端 |
| vlink::qnx | QNX IPC 后端 |
安装 VLink 后,cmake/functions/generator.cmake 随库安装至 <libdir>/cmake/vlink/functions/,在 find_package(vlink) 时自动包含,vlink_generate_cpp() 函数在消费项目中立即可用。该函数支持 Protobuf、FastDDS IDL 和 FlatBuffers 三种序列化格式的代码生成。
Protobuf 代码生成(TARGET 模式,推荐):
Protobuf 代码生成(变量模式):
FastDDS IDL 代码生成:
FlatBuffers 代码生成:
三种格式对比:
| 格式 | 生成工具 | 生成产物 | TARGET 类型 | 典型用途 |
|---|---|---|---|---|
| PROTO | protoc | .pb.h / .pb.cc | OBJECT/STATIC | 通用序列化、RPC 接口 |
| DDS | fastddsgen | .hpp / .cxx | OBJECT/STATIC | DDS 话题类型定义 |
| FBS/FLAT | flatc | .fbs.hpp(仅头文件) | INTERFACE | 高性能零拷贝序列化 |
| 选项 | 默认值 | 说明 |
|---|---|---|
| BUILD_SHARED_LIBS | ON | 构建动态库(.so)而非静态库(.a) |
| ENABLE_C_API | ON | 编译 C API 封装层(供 Python / Rust 等调用) |
| ENABLE_SECURITY | ON | 启用消息加密(依赖 OpenSSL) |
| ENABLE_PROXY | ON | 编译 Proxy 服务端(vlink-proxy) |
| ENABLE_SQLITE | ON | 启用 Bag 录制(依赖 SQLite3) |
| ENABLE_ZSTD | ON | MCAP Bag 文件的 Zstandard 压缩支持(依赖 libzstd;SQLite 路径独立走 LZAV) |
| ENABLE_CLI_* | ON | 按需编译各 CLI 工具(9 个独立开关) |
| ENABLE_VIEWER | OFF | 编译图形化 Viewer(依赖 Qt5/Qt6) |
| ENABLE_WEBVIZ | OFF | 编译 Web 可视化桥接(Foxglove / Rerun) |
| SELECT_LOG_BACKEND | spdlog | 日志后端(spdlog / quill / dlt / native) |
| ENABLE_CPM_BUILD | OFF | 使用 CPM.cmake 自动下载依赖 |
VLink 内建了完整的可观测性基础设施,从 CLI 命令行工具链、图形化 Viewer 套件到 Web 端 WebViz 桥接工具集(Foxglove / Rerun),形成"文字终端 + 桌面 GUI + Web 可视化"的三入口全场景覆盖。
VLink 遵循 Unix 哲学,将每个调试功能封装为独立的可执行程序,彼此职责清晰、部署灵活,与 ROS2 单一 ros2 命令形成鲜明对比。
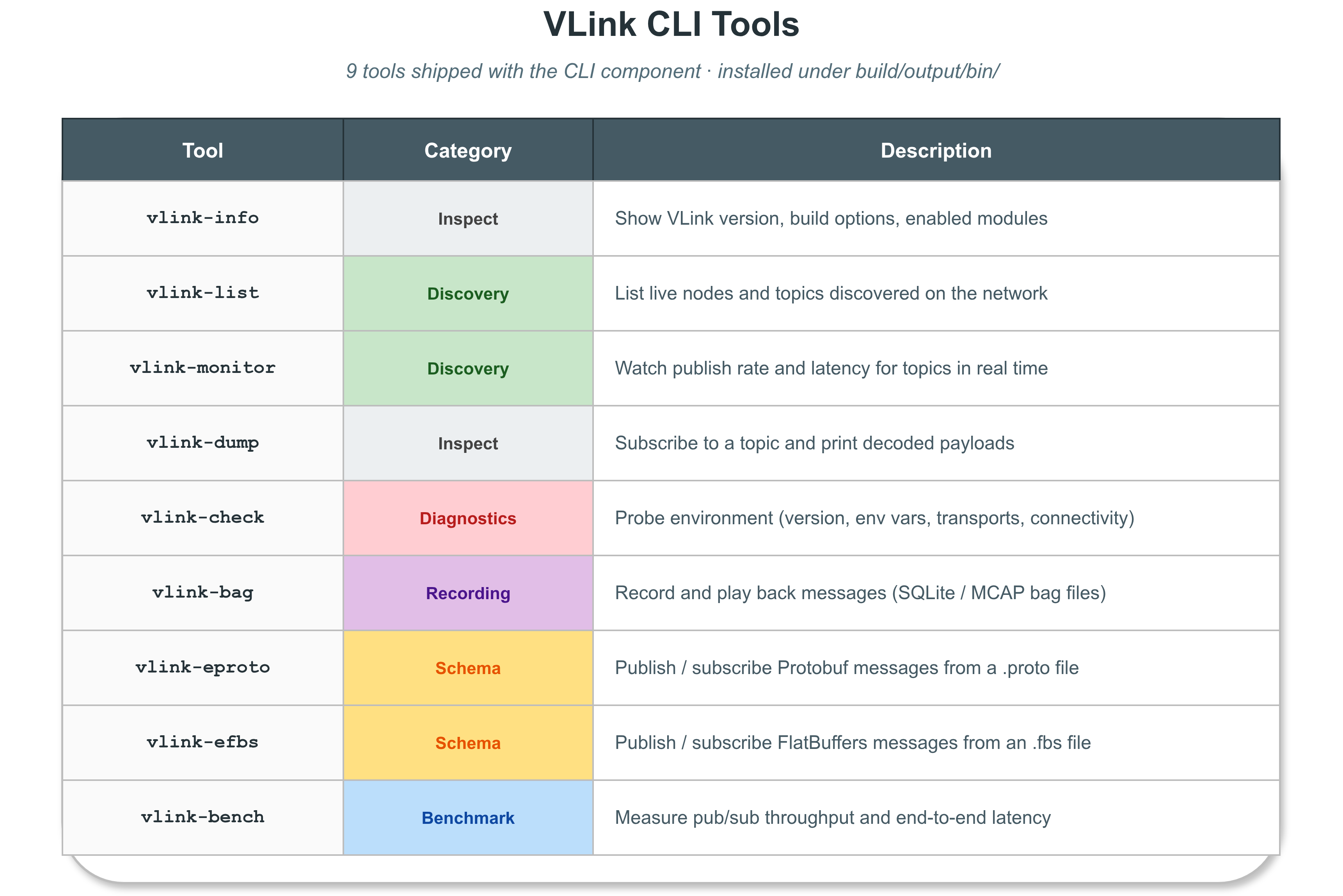
VLink CLI 工具链由 9 个独立可执行程序构成,各司其职,覆盖从系统诊断、运行时发现、实时监控,到数据管理与序列化调试、性能基准测试的全链路需求:
**图 12-3**:VLink CLI 工具链全景(待补充截图)
所有工具均采用 argparse 库统一解析命令行参数,支持 -h/--help 自动生成帮助文档,并通过编译宏 VLINK_VERSION 自动植入版本号。需要节点发现的工具(vlink-list、vlink-monitor、vlink-dump 等)内部使用 UDP 组播地址 239.255.0.100 进行节点广播收集,首次启动时会等待约 1 秒以完成拓扑感知,跨机器场景下需确保相关组播路由已正确配置。
功能定位: 版本信息与编译选项查询。不带参数输出版本框;附加 -l 参数列出所有编译期功能开关状态。
vlink-info 是最简洁的查询工具。不带参数运行时,以格式化方框输出当前 VLink 的版本号、构建时间戳、Git tag 与 commit-id;附加 -l/--list_options 参数则解析并展示 vlink-options.txt 中所有编译期功能开关(如 ENABLE_SECURITY、ENABLE_C_API、ENABLE_PROXY 等)的启用状态,方便快速核查运行时可用的能力集合。
功能定位: 系统环境自动诊断(IP/组播/磁盘/CPU/进程健康检查)。
vlink-check 是一个多子命令的环境诊断工具,涵盖三个维度:
vlink-check env 支持的部分关键环境变量:
vlink-check env 输出框架运行时关键环境变量的一个子集,便于快速了解常见运行时行为。完整的 VLINK_* 变量清单需参考源码(仓库中相关模块的环境变量读取处)。以下列举部分核心环境变量:
| 环境变量名称 | 说明 |
|---|---|
| VLINK_LOG_LEVEL | 全局日志级别(0=TRACE, 1=DEBUG, 2=INFO, 3=WARN, 4=ERROR, 5=FATAL, 6=OFF) |
| VLINK_LOG_DIR | 日志文件输出目录(不设置则只输出到终端) |
| VLINK_LOG_CONSOLE_LEVEL | 控制台日志级别 |
| VLINK_LOG_FILE_LEVEL | 文件日志级别 |
| VLINK_DDS_IP | DDS 通信绑定的网卡 IP 地址(多网卡机器必须设置) |
| VLINK_DDS_DOMAIN | DDS 域 ID(隔离不同系统的通信,默认 0) |
| VLINK_BAG_PATH | 全局 Bag 录制输出路径(设置后所有节点自动触发录制) |
| VLINK_BAG_TAG | Bag 录制会话标签名 |
| VLINK_DISCOVER_DISABLE | 禁用节点发现功能(设为 1) |
| VLINK_DISCOVER_NATIVE | 仅发现本机节点(设为 1) |
| VLINK_PROFILER_ENABLE | 启用 CPU Profiler(设为 1) |
| VLINK_QOS_CONFIG | 全局 QoS 配置文件路径 |
| VLINK_PROTO_DIR | Proto 文件搜索目录 |
| VLINK_FBS_DIR | FlatBuffers 文件搜索目录 |
| VLINK_ZENOH_CONFIG | zenoh:// 后端的配置文件路径 |
| VLINK_SOMEIP_CFG | SOME/IP 后端的 vsomeip 配置文件路径 |
| VLINK_SHM_DEPTH | shm:// 后端队列深度 |
| VLINK_URL_REMAP | URL 重映射配置 |
通过 VLINK_BAG_PATH 环境变量可以实现"透明录制"——在不修改任何应用代码的情况下,对系统中所有 VLink 节点的通信数据进行全量录制。这在紧急事故数据采集场景(如:发生碰撞时立即开始对前 60 秒数据进行录制)中极为实用。
vlink-check diag 的检查项目明细:
diag 子命令的完整检查清单覆盖以下类别:
**图 12-4**:vlink-check diag 全检查输出结果,展示 PASS/WARN/FAIL 状态(待补充截图)
vlink-list 通过 DiscoveryViewer 的 UDP 组播机制实时收集系统内所有在线 VLink 进程的通信拓扑,并以结构化方式展示每个进程下的所有通信节点(Server、Client、Publisher、Subscriber、Setter、Getter)及其对应的 URL、序列化类型等信息。
主要参数:
| 参数 | 含义 |
|---|---|
| -n / --native | 只显示本机进程 |
| -m / --name <名称> | 按进程名称过滤 |
| -p / --pid <PID> | 按进程 ID 过滤 |
| -c / --check_process_count | 仅输出发现的进程总数(用于脚本等待就绪判断,退出码即数量) |
该工具在系统集成调试阶段价值突出:当某个节点无法收到消息时,可用 vlink-list 快速确认对应 Publisher 是否已上线,以及 URL 是否拼写一致,从而将排查范围从网络层缩小到应用层。
**图 12-5**:vlink-list 拓扑输出示例(待补充截图)
vlink-monitor 是 VLink 调试工具链中功能最为丰富的交互式终端面板。它以全屏 TUI(Terminal User Interface)形式呈现系统运行时状态,内置基于 Braille 字符的 Sparkline 折线图,对每个订阅节点实时绘制**消息频率**、**数据速率**、**端到端延迟**与**丢包率**的历史曲线。
核心交互特性:
主要参数一览(部分):
| 参数 | 功能 |
|---|---|
| -u / --urls <url> | 订阅指定 URL(支持多个) |
| -i / --filter <str> | URL 关键字过滤 |
| -k / --black | 黑名单模式(取反 -u 和 -i 的过滤) |
| -n / --native | 仅显示本机节点 |
| -t / --node_count | 显示节点数量模式 |
| -l / --detail | 详细模式(实时计算帧率和带宽) |
| -o / --observe_all | 观测所有 URL 模式(需配合 -l) |
| -e / --profiler | 显示 CPU 性能分析信息 |
| -s / --ser | 显示序列化类型信息 |
| -x / --preset | 预设模式(等同 -l -o -p -c) |
| --plain | 纯文本输出模式(适合脚本/日志集成) |
| --dot | Dot 模式(替代 Braille 字符绘图) |
| --rows / --columns | 图表行列布局 |
完整交互热键列表:
| 热键 | 功能 |
|---|---|
| q / Ctrl+C | 退出监控面板 |
| Space | 暂停/恢复数据刷新 |
| ↑ / ↓ | 在话题列表中上下移动选中项 |
| ← / → | 向前/向后翻页 |
| Enter | 跳转查看选中话题的详细数据 |
| z | 取消当前选中 |
| t | 切换节点计数模式 |
| l | 切换详细模式(频率/速率/延迟/丢包) |
| o | 切换观测全部 URL 模式 |
| e | 切换 CPU 性能分析显示 |
| s | 切换序列化类型显示 |
| a | 切换仅显示活跃节点 |
| y | 切换仅显示 pub/sub 节点 |
| p | 切换进程面板(左侧栏展开/折叠) |
| c | 切换图表面板(右侧区域展开/折叠) |
vlink-bag 是 VLink 数据管理工具链的核心,提供 8 个子命令,覆盖 Bag 文件的完整生命周期:
| 子命令 | 功能 |
|---|---|
| info | 查看 Bag 文件元信息(话题列表、消息数量、时间范围、文件大小) |
| record | 实时录制通信数据到 Bag 文件(支持 SQLite 和 MCAP 后端) |
| play | 从 Bag 文件回放数据,支持时间过滤、速率控制与循环回放 |
| clone | 从一个 Bag 文件复制数据到另一个 Bag 文件(支持格式转换与过滤) |
| check | 验证 Bag 文件的完整性与索引正确性 |
| reindex | 重建 Bag 文件的时间索引 |
| fix | 修复损坏的 Bag 文件(如录制中断导致的不完整文件) |
| tag | 为 Bag 文件添加或查看自定义元数据标签 |
record 子命令的关键参数:
play 子命令的关键参数:
clone 子命令可将 Bag 文件中的数据复制到另一个 Bag 文件,支持格式转换(如 vdb 转 vcap、vcap 转 vdb)、时间范围裁剪、话题过滤与压缩——这在数据集管理、格式迁移与离线仿真场景下极为实用。
info 子命令详解:
vlink-bag info 是 Bag 文件管理的起点,它读取 SQLite 数据库的元数据表,输出以下关键信息:
record 子命令完整参数说明:
vlink-bag record 是数据采集的核心工具,其参数体系覆盖了生产级录制的所有控制维度:
| 参数 | 类型 | 说明 |
|---|---|---|
| path(位置参数) | string | 输出 Bag 文件路径(必填,如 /tmp/bag.vdb) |
| -u / --urls | string | 指定要录制的 URL(支持多个,空表示录制全部) |
| -i / --filter | string | URL 关键字过滤(只录制匹配的话题) |
| -k / --black | bool | 黑名单模式(取反 -u 和 -i 的过滤) |
| -t / --tag | string | 设置录制文件的 tag 名称 |
| -d / --duration | float | 录制时长(秒,0 为永久) |
| -n / --native | bool | 仅录制本机节点 |
| -p / --compress | bool | 启用压缩(SQLite .vdb 走 LZAV,MCAP .vcap 走 Zstandard) |
| --compress_level | int | 压缩级别(1-5,0 表示默认,默认 3) |
| --max_bytes_size | uint64 | 最大文件大小限制(GB) |
| --max_row_count | uint64 | 最大消息条数限制 |
| --max_memory_size | uint64 | 内存缓冲区大小上限(GB,防止高负载下 OOM) |
| --max_task_depth | int | 异步写入队列深度上限 |
| --ignore_compress | string | 对指定 URL 跳过压缩(如图像数据已压缩,无需重复) |
| -z / --split_by_size | float | 按大小分包(GB,后缀名需为 vdbx/vcapx) |
| -y / --split_by_time | float | 按时间分包(秒,后缀名需为 vdbx/vcapx) |
| -s / --sync_mode | bool | 同步写入模式(默认异步队列模式) |
play 子命令高级用法:
vlink-bag play 支持多维度的时间范围过滤,满足"只回放感兴趣的时间段"的需求:
| 参数 | 含义 |
|---|---|
| path(位置参数) | Bag 文件路径(必填) |
| --rel_begin_time | 相对开始时间(格式:'00:00:10' 或 00:00:10:000) |
| --rel_end_time | 相对结束时间(格式同上) |
| --local_begin_time | 按本地时间指定开始点(格式:'HH:MM:SS') |
| --local_end_time | 按本地时间指定结束点 |
| --utc_begin_time | 按 UTC 时间指定开始点 |
| --utc_end_time | 按 UTC 时间指定结束点 |
| -b / --begin_time | 按 Unix 时间戳(秒)指定开始点 |
| -e / --end_time | 按 Unix 时间戳(秒)指定结束点 |
| -r / --rate | 回放速率倍率(0.5 = 半速,2.0 = 2 倍速) |
| -t / --times | 回放次数(小于等于 0 表示无限循环回放) |
| -m / --skip_blank | 跳过开头空白时间段 |
tag 子命令:数据标注与搜索
vlink-bag tag 为 Bag 文件提供了元数据标注能力,支持添加任意 key-value 标签,用于描述录制场景的特殊属性:
标签数据存储在 Bag 文件的 SQLite 数据库的独立表中,不影响消息数据的读写性能。在大规模数据集管理中,tag 机制可以用于构建基于场景描述的数据集检索系统——例如筛选出所有包含"雨天 + 高速公路"场景的 Bag 文件用于边缘场景算法验证。
SQLite 后端的工程优势:
VLink Bag 文件同时支持 SQLite(<tt>.vdb/.vdbx)和 MCAP(<tt>.vcap/.vcapx)两种存储格式,其中后缀 x 表示启用分包模式。SQLite 格式作为默认后端,有以下工程考量:
MCAP 格式则提供了与 Foxglove 等生态工具的兼容性,clone 子命令支持在两种格式之间自由转换。
录制任务支持通过 --max_memory_size 限制内存队列大小以防止在高负载下的内存溢出,-l/--detail 开启详细模式查看每条消息内容。
**图 12-7**:vlink-bag info 输出示例与 record 录制进度界面(待补充截图)
功能定位: 从实时流或 Bag 文件提取并导出数据(console/CSV/JSON/bin/JPG/H264/H265/raw/PCD)。
vlink-dump 支持九种输出格式,覆盖数据集制作、算法离线评测、图像抽帧与点云导出等场景:
| 格式 | 适用场景 | 说明 |
|---|---|---|
| console | 实时终端调试 | 在终端直接打印消息内容,支持字段提取与数学表达式 |
| csv | 结构化数据量化分析 | 通过 -c 指定字段路径,提取特定字段为 CSV |
| json | 与 Python/JS 工具集成 | 通过 -c 指定字段路径,提取为 JSON 数组 |
| bin | 原始消息存档 | 每条消息的完整序列化字节保存为独立 .bin 文件 |
| jpg | 相机图像数据集制作 | 解码图像消息,以 JPEG 格式逐帧保存 |
| h264 | 视频文件导出 | 图像帧流编码为 H.264 |
| h265 | 高压缩率视频导出 | H.265/HEVC 编码,相同质量文件体积更小 |
| raw | 原始数据提取 | 将消息的原始序列化字节直接输出,不做任何解码 |
| pcd | 点云数据集制作 | 零拷贝 PointCloud 导出为 PCD v0.7 二进制格式 |
功能定位: Protobuf 序列化数据的动态发布与订阅调试工具。
vlink-eproto 支持 Protobuf(<tt>.proto 文件)的动态加载与解析,无需预先编译消息类型即可进行发布与订阅,提供 pub/sub 两个子命令:
sub 主要参数:
| 参数 | 功能 |
|---|---|
| url(位置参数) | 订阅的 URL 地址(必填) |
| -d / --proto_dir | Proto 文件目录(或通过环境变量设置) |
| -s / --ser_type | Protobuf 序列化类型全名(如 sensor_msgs.Imu) |
| -i / --filter | 过滤顶层 field 名字 |
| -k / --black | 黑名单模式(取反 -i 的过滤) |
| -n / --native | 仅接收本机节点数据 |
| -m / --max_str_count | 最大字符串长度限制 |
**图 12-8**:vlink-eproto sub 实时解码输出界面,展示 JSON 格式的 Protobuf 消息内容(待补充截图)
功能定位: FlatBuffers 序列化数据的动态发布与订阅调试工具。
vlink-efbs 结构与 vlink-eproto 完全一致,区别仅在于使用 --fbs_dir 替代 --proto_dir 指定 FlatBuffers schema 目录,使用 flatc 动态解析 .fbs 文件。
功能定位: 发布/订阅链路的性能基准测试与报告生成。
vlink-bench 是 VLink 内置的矩阵化基准测试工具,围绕 URL、执行模式、拓扑、QoS、payload 类型、报文大小、发布速率和序列化路径展开受控测试,输出 JSON 原始样本、CSV 聚合数据、交互式终端表格与带评分/折线图的 HTML 报告。工具提供四个子命令:
| 子命令 | 用途 |
|---|---|
| run | 执行基准测试。默认走 showcase 预设,可切换到 quick 或 full 预设扩大测试矩阵;支持 -u/--url、-s/--suite、-m/--mode、-t/--topology、--pattern、-q/--qos 等维度组合 |
| plot | 从已有 bench.json 结果重建 html / csv / terminal 报告 |
| pub/sub | process 模式内部 worker 子命令,由主进程通过 vlink/base/process 拉起,一般不手工调用 |
测试套件覆盖 throughput、latency、topology、serialization 四类;执行模式支持 local-direct、local-loop、process;拓扑覆盖 1:1、1:n、n:1、n:n。完整的命令行参数、终端交互按键、HTML 报告结构和默认测试策略详见 13-cli-tools.md#vlink-bench。
VLink 内置了轻量级的 CPU 性能剖析器(CpuProfiler),对每个节点的 CPU 使用率进行实时测量:
剖析数据也会通过 DiscoveryViewer 广播到整个系统,使系统级 CPU 监控成为可能。
VLink 的日志系统设计充分考虑了工程实践的需求:
零开销的编译期过滤:
多后端支持: VLink 日志后端通过编译选项 SELECT_LOG_BACKEND 配置为 spdlog(默认,高性能异步日志)、quill(低延迟异步日志)、dlt(AUTOSAR DLT 协议)或 native(平台原生日志:Android logcat / QNX slog2 / Linux kmsg,自动适配),一份代码适应不同部署环境。
回溯日志(backtrace):
四种书写风格满足不同偏好:
VLink 为 Getter(及其他传输节点)提供了内置的延迟与丢包统计能力:
这一特性在系统集成阶段极为有价值:可以在不借助外部工具的情况下,直接从代码中获取端到端延迟数据,验证系统的实时性是否满足设计要求。
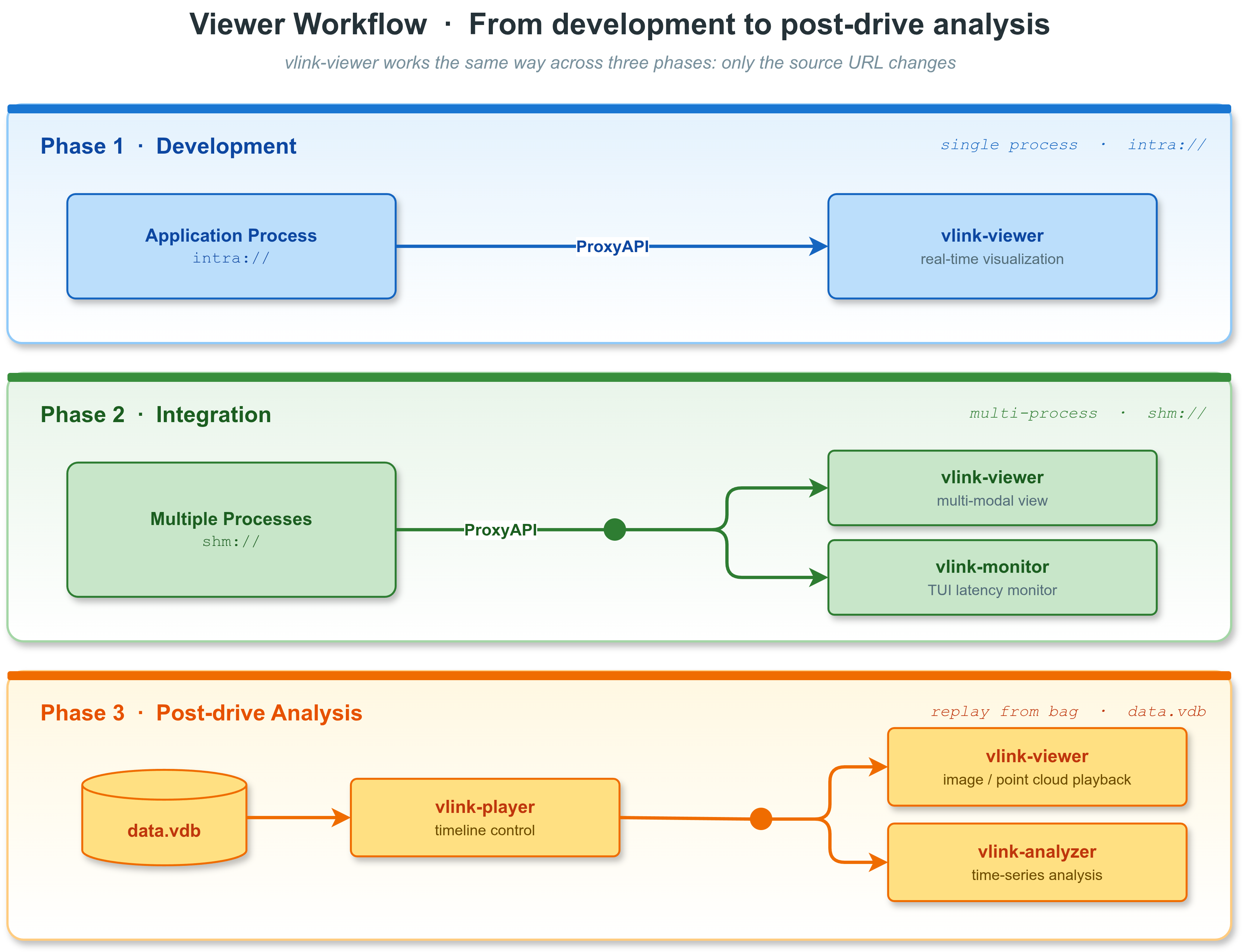
VLink Viewer 是 VLink 生态中独立于 CLI 工具链的图形化可视化套件,基于 Qt5/Qt6 框架构建,由三个独立可执行程序组成:**vlink-viewer**(主监控窗口)、**vlink-player**(Bag 文件回放播放器)、**vlink-analyzer**(时序数据分析器)。相比纯文本 CLI 工具,Viewer 套件将多维度、多模态的传感器数据以直观的二维图像、三维点云、时序折线图等形式同步呈现,极大地降低了自动驾驶与机器人系统在调试、验证和演示阶段的认知门槛。
**图 12-9**:VLink Viewer 整体工具链架构示意(待补充图示)
三程序独立架构的设计哲学
VLink Viewer 刻意采用"三程序分离"而非"单一大型 GUI 应用"的架构,背后有明确的工程考量:
三者既可独立使用,也可通过 IpcChannel(内部进程间通信通道)协同工作——以 vlink-player 为主进程,启动 vlink-viewer 和 vlink-analyzer 作为子进程,三窗口共享同一回放时间轴,形成"回放 + 实时可视化 + 时序分析"的联动工作台。这一设计避免了单一大型应用难以分模块部署、难以独立升级的问题。
技术依赖栈
VLink Viewer 依赖的主要技术组件如下:
| 组件 | 版本要求 | 用途 |
|---|---|---|
| Qt5 / Qt6 | 5.15 / 6.x | 界面框架(Widgets / OpenGLWidgets / Network / Sql) |
| OpenSceneGraph | 3.x | 三维点云与场景图渲染引擎 |
| FFmpeg | 4.x+ | H.264 / H.265 / YUV 视频硬解码 |
| Protobuf | 3.x | 消息动态解析(无需预编译 .proto) |
| Eigen3 | 3.x | 相机内外参数矩阵运算(2D/3D 坐标投影) |
| QCustomPlot | 2.x(内置) | 时序曲线绘图(Analyzer 窗口) |
ProxyAPI 通信层
三个可执行程序均通过 VLink 内部的 ProxyAPI 进行消息订阅与接收,无需依赖任何外部守护进程。ProxyAPI 的核心设计有两个关键特性:
这一设计使 VLink Viewer 在实际项目中可以做到真正的"零成本接入"——在系统联调的第一天就可以打开 vlink-viewer 观察全局数据流,无需任何代码改动。
典型工作流程
与 CLI 工具链相比,VLink Viewer 的核心优势在于:
vlink-viewer 是整个可视化工具链的入口,提供一个多面板主窗口,集中展示当前系统中所有在线通信节点的实时数据流。
主窗口的功能模块通过菜单栏进行组织,包含以下核心功能:
| 功能入口 | 快捷键 | 功能描述 |
|---|---|---|
| Camera Viewer | S | 多通道相机图像实时预览 |
| Point3D Viewer | Z | 三维点云实时渲染与交互操作 |
| Map Viewer | G | 地图与定位轨迹叠加显示 |
| Record Dialog | R | 图形化消息录制控制面板 |
| Play Dialog | P | 图形化 Bag 回放控制面板 |
| Raw Viewer | J | 原始十六进制数据查看器 |
| Analyzer | K | 启动 vlink-analyzer 独立窗口 |
| Topology | N | 系统节点拓扑图显示 |
| DB Browser | W | SQLite Bag 文件浏览器 |
| Protobuf Decoder | F | 在线 Protobuf 消息解码与字段查看 |
| Communication Matrix | M | 通信矩阵热力图(节点间流量可视化) |
| Status Viewer | X | 系统状态实时监控 |
| Proto Viewer | Y | .proto 文件结构查看 |
节点树与实时数据订阅
主窗口内部维护一套以 URL 为键的 TreeWidgetItem 树状结构,所有消息节点均以树形方式呈现,支持按进程分组、按话题 URL 过滤。每个树节点实时显示该话题的消息频率、最新消息时间戳、序列化类型及连接状态,可快速判断某条数据链路是否存在掉线或延迟异常。当用户双击某个节点时,对应的可视化面板(图像/点云/数据表)会自动弹出并开始订阅。
Protobuf 动态解码
Protobuf Decoder(快捷键 F)是一个无需预编译的运行时 Protobuf 消息查看器。通过 VLink 的 schema 注册机制,viewer 可以在运行时获取所有已注册的 .proto schema 并动态解析接收到的消息二进制数据,以 JSON 树形视图展示每个字段的名称、类型与当前值。这对于在不同团队协作开发、无法统一编译 .proto 文件的场景下极为实用。
通信矩阵(Communication Matrix)
快捷键 M 打开通信矩阵热力图,以进程为行/列轴,用颜色深浅表示进程间消息流量(消息数量或数据量),直观呈现系统中哪些模块之间的通信最为密集。这一视图特别适合在系统架构审查时,快速识别意料之外的通信关系或不合理的数据耦合。
拓扑图(Topology)
快捷键 N 打开拓扑图面板,以有向图方式展示当前所有在线进程之间的 Publisher-Subscriber 连接关系。图中每个节点代表一个 VLink 进程,每条有向边代表一条活跃的数据订阅关系,边上标注 URL。这一视图是系统集成初期快速验证"数据是否被正确接收"的最直观工具。
DB Browser
快捷键 W 打开 SQLite Bag 文件浏览器,允许用户直接浏览 Bag 文件的原始数据库结构,查看每条消息记录的时间戳、序列号、数据大小以及序列化格式,支持对原始二进制数据进行十六进制预览。对于需要精确验证录制完整性、或手动提取特定消息记录的场景,DB Browser 提供了 vlink-bag info 命令以外更细粒度的数据访问能力。
原始数据查看器(Raw Viewer)
快捷键 J 打开十六进制原始数据查看器(Raw Dialog),订阅指定 URL 并实时展示原始消息的二进制数据,支持十六进制与 ASCII 双栏显示,提供暂停/恢复功能。在调试自定义序列化格式或排查消息损坏问题时,Raw Viewer 是最底层的故障诊断工具。
录制控制(Record Dialog)
快捷键 R 打开图形化录制控制面板。状态机涵盖 Disable / Stopped / Recording / Paused 四个状态,支持对每个话题独立勾选是否参与录制、实时查看每路话题的消息接收数量与丢包统计,录制完成后自动在界面中显示 Bag 文件路径,可一键切换到 Play Dialog(快捷键 P)进行回放验证。这一录制-回放的无缝闭环设计,使得在发现异常行为时可以立即开始录制,随后对问题场景进行精细化复盘分析,而无需离开 vlink-viewer 界面。
**图 12-10**:vlink-viewer 主窗口界面(待补充截图)
**图 12-11**:vlink-viewer 通信矩阵(Communication Matrix)与拓扑图(Topology)视图(待补充截图)
相机图像查看器(Camera Viewer)是自动驾驶场景中使用频率最高的可视化功能。其核心特性包括:
多通道网格布局: 支持同时订阅多路相机 URL,以可配置的网格布局(Grid Layout)排列展示,开发者可在单一窗口内同时预览车头、车尾、左右侧视、前鱼眼等所有视角,无需多次开启窗口。
硬件加速解码: 集成 FFmpeg 解码器,原生支持 H.264、H.265(HEVC)与 YUV 格式的视频流。解码状态机包含 kNoImage(无图像)、kNoSupport(格式不支持)、kParseFailed(解析失败)、kLoadFailed(加载失败)、kLoadSucceed(成功加载)五种状态,解码异常时会在图像区域显示清晰的状态提示,便于问题定位。
暂停与单帧回退: 提供帧级暂停能力,在回放模式下可逐帧检查异常目标检测结果,对于事故数据的精细化分析极为关键。
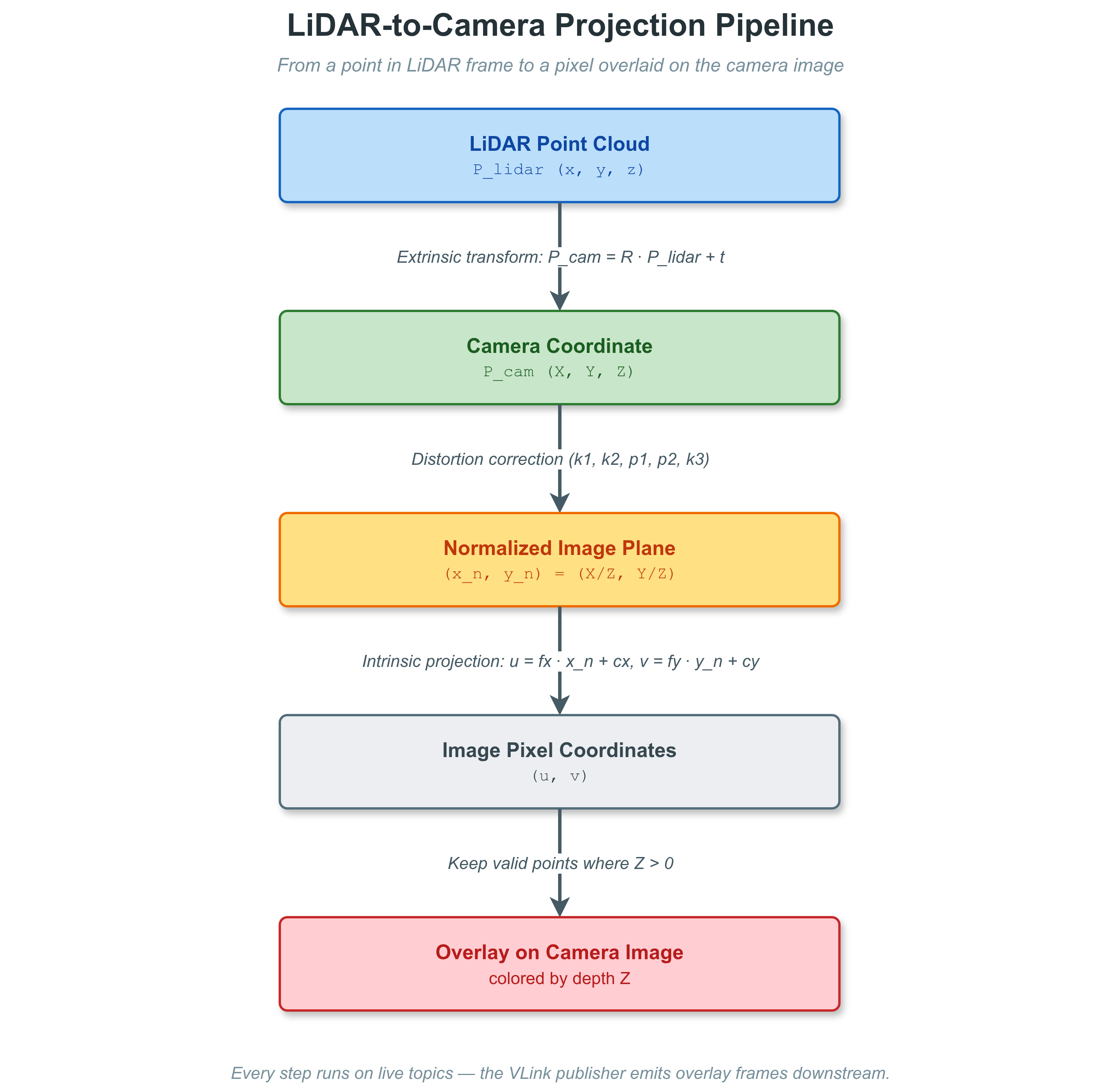
三维投影叠加(Projection Overlay): 这是相机查看器最具独特性的功能。通过 ProjectionDialog 配置相机内参矩阵(Eigen::Matrix3Xf 3×3 矩阵,包含焦距 fx/fy 与主点 cx/cy)、畸变系数(5 参数数组,对应 k1/k2/p1/p2/k3 的径向与切向畸变)、外参旋转向量(ext_rvec,Rodrigues 表示的旋转)与平移向量(ext_tvec,激光雷达坐标系到相机坐标系的平移),可将来自 vlink-viewer 点云查看器中的三维点云数据**实时投影到对应相机图像平面**,形成 2D-3D 融合的可视化视图。
投影计算流程如下:
这一功能对于以下场景具有重大价值:
**图 12-12**:相机图像查看器界面及 2D-3D 投影叠加效果(待补充截图)
点云查看器(Point3D Viewer)基于 OpenSceneGraph(OSG)渲染引擎构建,能够实时渲染并交互操作来自 LiDAR 或深度相机的三维点云数据。
核心功能:
多 URL 点云叠加: 内部以 Point3dMap(url → vector<PointData>)的形式管理多路点云数据,可同时渲染来自不同传感器的点云,并以不同颜色区分来源。
动态点云过滤(AST 表达式引擎): 查看器内置了一个 AST(Abstract Syntax Tree)表达式解析器,允许用户在 UI 界面中直接输入布尔表达式过滤条件,支持的运算符包括比较(>、<、>=、<=、==、!=)、逻辑运算(&&、||、!)和括号分组。每个点的属性(x、y、z、intensity、r、g、b)均可作为过滤变量,由 ASTNode 对每个点实时求值,只渲染满足条件的点。
典型过滤表达式示例:
这一能力使开发者无需修改代码即可在运行时动态调整可视化范围,对于"聚焦特定感兴趣区域"、"排除标定板/遮挡物干扰"等调试场景极为便捷。
车辆模型叠加: 内置车辆 3D 模型文件(car.osgb)自动加载,以点云原点为中心叠加显示车辆几何形态,便于直观判断点云坐标系与车辆坐标系的对齐关系。
场地平面网格: 渲染可配置尺寸的地面网格(Platform Mesh),提供三维空间的视觉参考系。
点选交互(OsgSelectHandler): 支持鼠标在点云上直接点击选点,自动显示被选中点的三维坐标与属性(intensity、颜色通道值等)。
颜色映射与点大小控制: 提供颜色范围映射控件(color_range_controls),可按高度(z 值)、强度(intensity)或 RGB 通道着色;支持动态调整点的显示尺寸。
渲染性能优化: OpenSceneGraph 的场景图(Scene Graph)管理使得增量更新点云数据时无需重建整个渲染树,仅更新变化的几何体节点,保证了大规模点云(数十万乃至百万点)在每帧刷新时的渲染效率。osgManipulator 提供轨迹球(Trackball)交互模式,鼠标拖拽即可自由旋转、缩放视角,键盘快捷键可快速切换正视/侧视/俯视等标准视角。
相机联动: 通过 CameraDialog friend 关系与相机查看器深度集成,在点云查看器中框选某片区域时,对应的三维点会被反投影到相机图像中并以彩色覆盖层(Overlay)标注,形成点云-图像的双向关联高亮,便于验证感知目标的空间一致性(见 12.7.3 节 Projection Overlay 部分)。
**图 12-13**:三维点云查看器界面及多传感器叠加效果,展示 AST 过滤与车辆模型叠加(待补充截图)
vlink-player 是专用的 Bag 文件回放播放器,提供完整的回放控制界面,设计上类似于多媒体播放器:
核心交互特性:
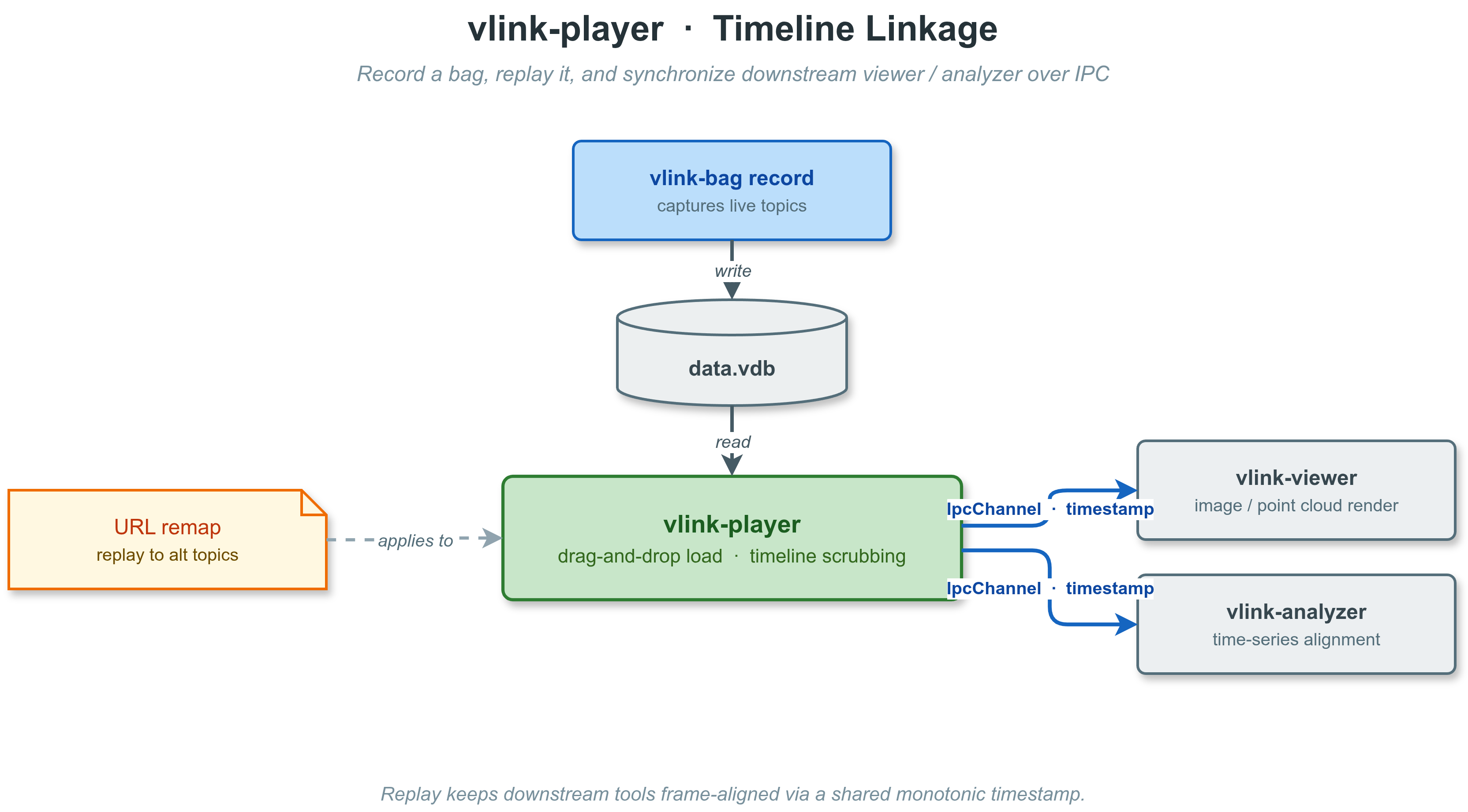
URL 重映射(UrlRemap): 内置的 URL 重映射支持在回放时将 Bag 中录制的原始 URL 映射到不同的目标 URL,例如将录制时的 shm://sensor/camera_front 重映射为 dds://sensor/camera_front,使同一个 Bag 文件可以在不同传输后端配置的环境中复用,而无需重新录制。这对于跨团队数据共享、算法评测标准化具有重要价值。
**图 12-14**:vlink-player 回放控制界面,展示进度条、时间基准选择与联动启动选项(待补充截图)
vlink-analyzer 是 VLink Viewer 工具链中面向数据挖掘与量化分析的专用窗口,基于 QCustomPlot 库构建,能够对 Bag 文件或实时数据流中的任意字段绘制高精度时序曲线。
JSON 驱动的分析配置: 分析方案通过 JSON 配置文件定义,无需编写代码。每个分析单元(PlotUnit)包含以下配置项:
expression 字段使用点分隔的 Protobuf 字段路径(如 header.stamp.sec、pose.position.x),分析器会自动从消息流中提取对应字段值并绘制为时序曲线。
三种分析类型:
| 类型 | 含义 | 典型用途 |
|---|---|---|
| kFrequencyType | 统计消息发布频率(Hz)随时间的变化曲线 | 检测消息频率异常、掉帧规律、丢包窗口 |
| kValueType | 绘制消息字段数值的时序折线图 | 速度/加速度/位姿分析、传感器噪声评估 |
| kCustomType | 自定义表达式计算(多字段组合运算,支持四则运算) | 跟踪误差计算、多传感器时序差分对比 |
**expression 字段语法**:使用 Protobuf 字段路径(如 header.stamp.sec、pose.position.x、velocity.linear.x),支持基本数学运算,分析器自动从消息流中提取对应字段值并绘制为时序曲线。当 ext_zero_start 为 true 时,曲线自动以第一个样本点为零基准绘制相对值,便于多条曲线的横向对比。
进度追踪与批量处理: 分析较大 Bag 文件时,界面右下角显示处理进度条与 GIF 动画指示器(ext_progress_gif),避免用户误判为程序卡死。分析完成的结果会缓存在内存中,支持在不重新处理 Bag 文件的情况下调整图表显示范围、切换曲线可见性。
与 vlink-player 的时间轴联动: 通过 IpcChannel 机制,vlink-analyzer 与 vlink-player 共享同一时间轴游标(QCPItemLine)。当用户在 player 中拖动进度条时,analyzer 中对应的时间线指示线实时同步跟随,使两个窗口的视图始终保持时序对齐。反向联动同样支持:在 analyzer 图表上点击某一时间点,player 会自动跳转到对应时刻——这极大地提升了"发现异常数据点 → 立即回放该时刻图像/点云"的调试效率。
数据导出: 分析完成的曲线数据可导出为 CSV 格式,便于在 Excel、Python(pandas/matplotlib/seaborn)等外部工具中进行进一步统计分析;图表本身可导出为 PNG 高分辨率图片,直接用于技术报告或文档撰写。支持在同一图表中叠加来自多个不同 URL 的曲线,以直观呈现多传感器数据的时序相关性。
**图 12-15**:vlink-analyzer 时序分析窗口,展示多曲线叠加与时间轴联动游标(待补充截图)
VLink Viewer 工具链以图形化界面将多模态传感器数据、时序特性与系统拓扑变为可视化的"实时仪表盘"。其相机-点云联动投影、AST 动态点云过滤、JSON 驱动的离线分析配置、三窗口 IpcChannel 时间轴联动,以及内置 Bag 录制-回放闭环,构成了自动驾驶与机器人系统调试的高度集成可视化平台,与 CLI 工具链共同实现"文字终端 + 图形界面"双入口的全场景覆盖。
除了桌面 Qt Viewer 套件之外,VLink 还提供了面向可视化前端的桥接工具集 —— **WebViz**,包含两个独立 C++ 可执行文件(vlink-foxglove、vlink-rerun),将 VLink 中间件的实时通信数据以标准化协议推送到业界主流的可视化平台:Foxglove Studio(基于浏览器的 Web 客户端,通过 WebSocket 接入)和 Rerun Viewer(原生桌面客户端,通过 gRPC 接入)。需要强调的是,这两个桥接工具本身是需要单独部署运行的 C++ 进程,而不是纯浏览器端方案;Foxglove Studio 可以在浏览器中打开,Rerun Viewer 则以原生窗口形式运行。
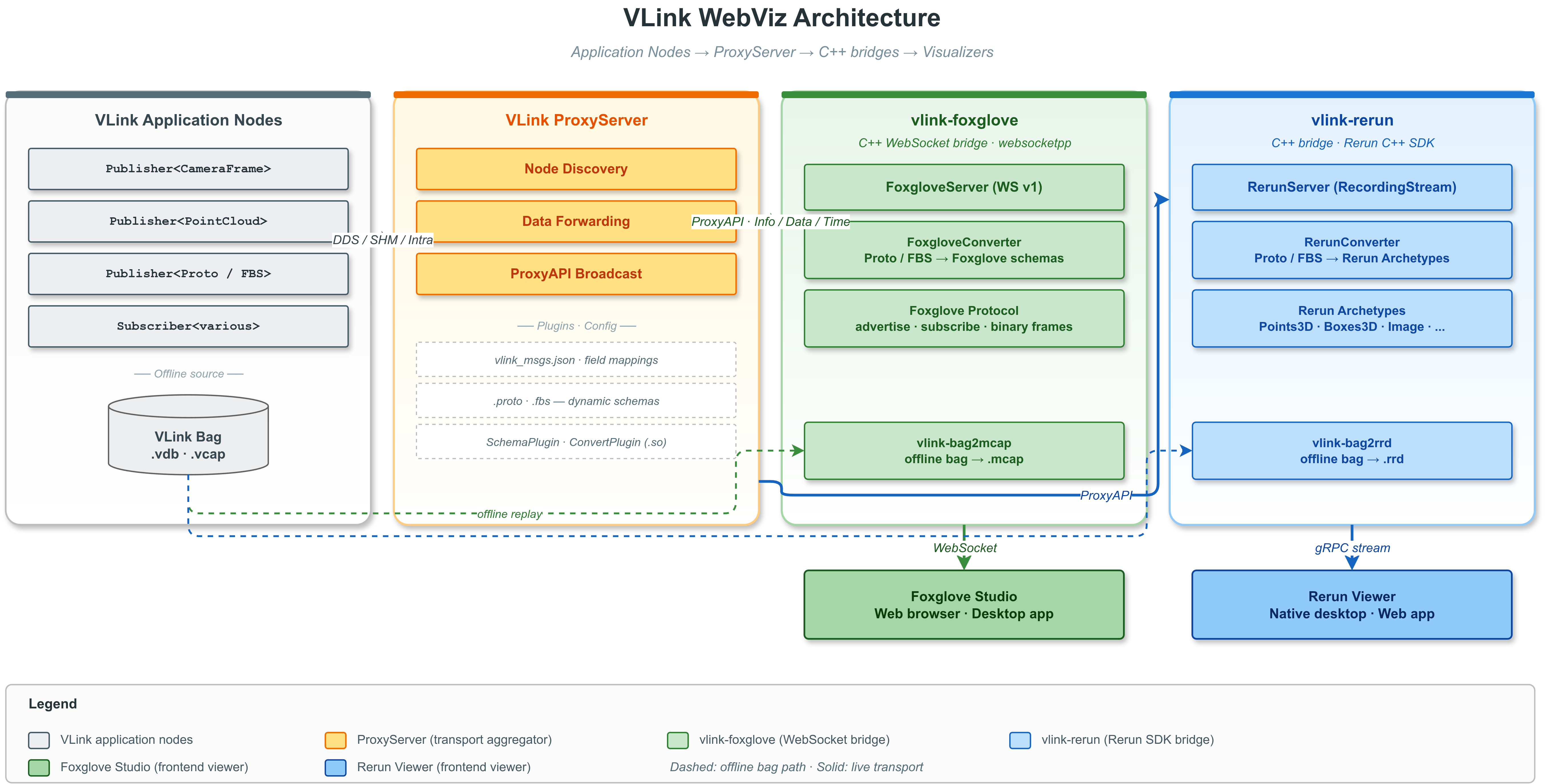
**图 12-16**:VLink WebViz 整体架构 —— 通过 ProxyAPI 订阅 VLink 数据,经 Converter 转换后推送到 Foxglove Studio(WebSocket)和 Rerun Viewer(gRPC)
WebViz 的核心设计思想是"桥接":VLink 应用节点通过各种传输后端发布数据,ProxyServer 聚合数据流,WebViz 工具通过 ProxyAPI 以 Controller 角色订阅数据,将 VLink 原生消息格式(Protobuf、FlatBuffers、零拷贝类型)转换为目标平台的标准 Schema,再通过 WebSocket 或 gRPC 推送到前端。
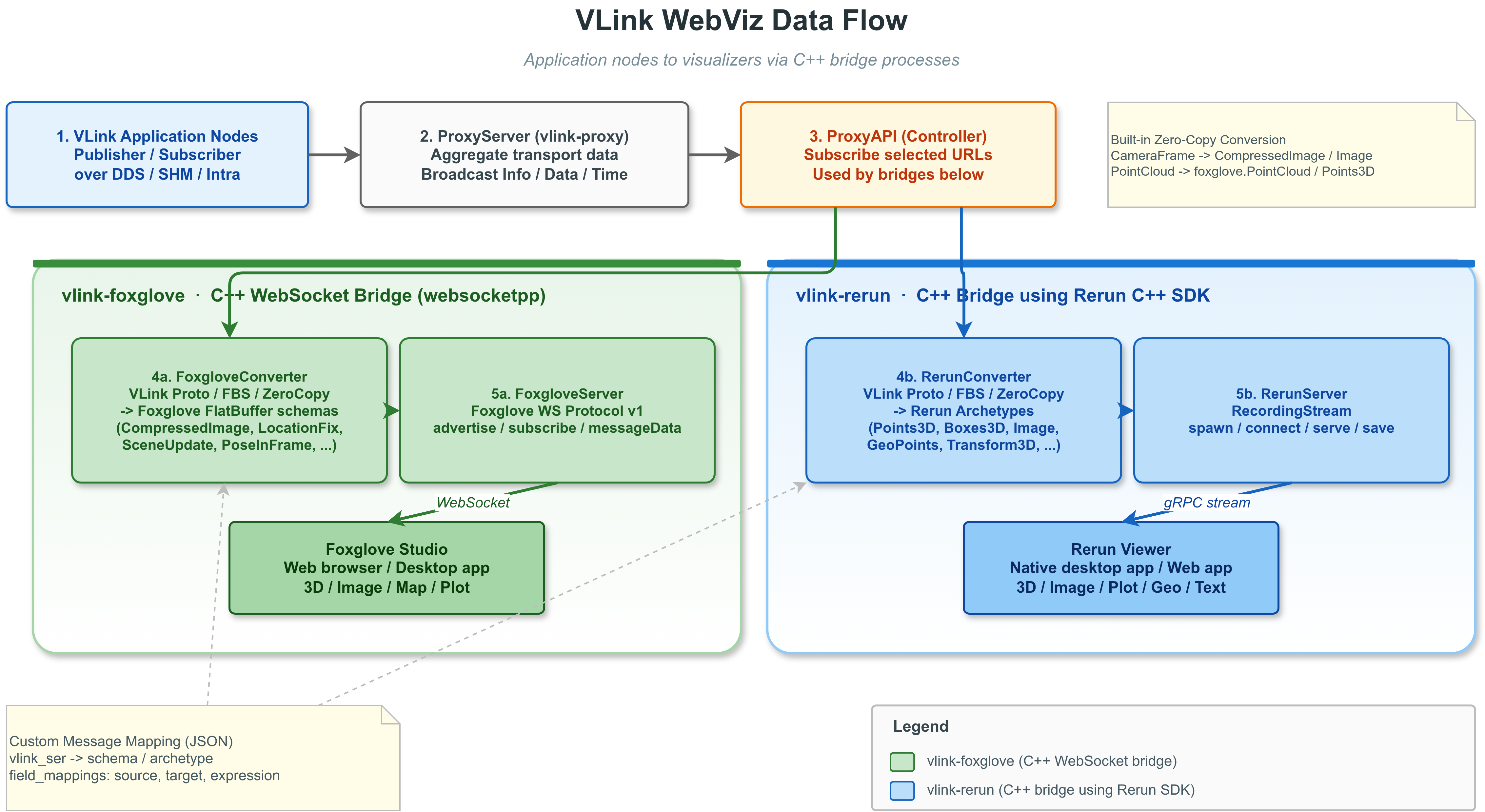
**图 12-17**:WebViz 数据流 —— 从 VLink 节点到 Web 前端可视化器的完整数据路径
vlink-foxglove 实现了 Foxglove WebSocket Protocol v1,是一个实时 WebSocket 桥接服务。核心组件包括:
典型启动方式:
vlink-rerun 将 VLink 数据流转换为 Rerun 原生 Archetype 格式,通过 gRPC 推送到 Rerun Viewer 进行多模态可视化。核心组件包括:
RerunServer 使用 vlink_time(duration nanos)和 seq(序列号)双时间轴管理,将 VLink 消息的 URL 通过 url_to_entity_path() 转换为 Rerun 实体路径(如 dds://camera/front → dds/camera/front)。
典型启动方式:
WebViz 还提供了两个离线 Bag 文件转换工具:
/.vcap)转换为 MCAP 格式,可在 Foxglove Studio 中离线打开。输出的 MCAP 文件按 MCAP 路径的压缩实现走 Zstandard 压缩(SQLite .vdb 侧实际仅启用 LZAV,两种格式互转时会重新按目标格式的压缩策略处理),自动注册 Schema 和 Channel,实时显示转换进度。
两者均复用各自后端的 Converter 引擎和自定义消息映射配置,保证在线实时可视化与离线文件分析的数据转换行为完全一致。
WebViz 最核心的扩展能力在于 JSON 驱动的自定义消息映射。通过 JSON 配置文件定义任意 VLink 消息类型到可视化 Schema 的字段映射规则,无需编写 C++ 代码。映射支持嵌套字段路径(如 pose.position.x)、默认值、以及 exprtk 数学表达式(可执行 atan2、sqrt、clamp、if 等运算,实现单位换算、坐标变换、条件计算等复杂转换逻辑)。
WebViz 预置了相机帧、点云、GNSS、IMU、位姿、障碍物、轨迹、雷达等常用自动驾驶消息类型的映射文件。对于新增的自定义消息类型,用户只需编写一个 JSON 文件即可完成接入,整个过程无需修改、编译任何 C++ 代码。
**完整的 WebViz 文档请参见 15-webviz.md**。
性能基准测试是中间件选型决策的核心依据,也是评估工程可行性的客观基础。本章对 VLink 的主要传输后端进行系统性的延迟与吞吐量测试,并与同类主流方案进行横向比较。所有具体测试数值均为**预留占位区域**,将在项目正式发布基准测试套件后以实测数据填充。
测试场景的现实意义
在自动驾驶系统中,不同类型的消息对通信性能有截然不同的要求:
| 消息类型 | 典型大小 | 典型频率 | 关键指标 | 对应传输后端建议 |
|---|---|---|---|---|
| 控制指令(转向/油门) | 64 B | 100-1000 Hz | P99 延迟 < 1 ms | intra / shm |
| IMU 数据 | 256 B | 200-1000 Hz | P99 延迟 < 2 ms | intra / shm |
| 结构化感知结果 | 1-64 KB | 20-100 Hz | P99 延迟 < 10 ms | shm / dds |
| 压缩相机图像 | 100-500 KB | 10-30 Hz | 吞吐量稳定性 | shm / shm2 |
| LiDAR 原始点云 | 1-10 MB | 10-20 Hz | 零拷贝 / CPU 占用 | shm / shm2(零拷贝必选) |
| 跨机器分布式数据 | 任意 | 任意 | 网络延迟 + 抖动 | dds / ddsc / zenoh |
因此,VLink 的测试不能仅关注某一特定场景,而需要覆盖从"低延迟小包"到"高吞吐大包"的全谱段,并区分进程内、同机跨进程与跨机器三种部署拓扑。
测试环境(参考配置):
| 项目 | 规格 |
|---|---|
| 操作系统 | Ubuntu 22.04 LTS(内核 6.2,实时补丁 PREEMPT_RT) |
| CPU | Intel Core i9-13900K(8P+16E,5.8GHz boost) |
| 内存 | 64 GB DDR5-6000 |
| 网络 | 千兆以太网(跨机测试) |
| 编译器 | GCC 12.2,-O2 -DNDEBUG,关闭 ASLR |
| VLink 版本 | 2.0.0 |
| ROS2 版本 | Humble(Fast-DDS 2.10) |
| CycloneDDS | 0.10.x |
| Zenoh-C | 0.11.x |
| Iceoryx (shm) | 2.0.x |
测试方法论:
原理分析
进程内传输(intra://)是 VLink 延迟最低的传输模式。其实现原理是:在同一进程的线程间,直接传递消息对象的共享指针(std::shared_ptr)或引用,完全绕过序列化、系统调用(write/read)、网络协议栈、共享内存映射等所有额外开销。唯一的同步原语是内部消息队列中的一个锁(或无锁原子操作),延迟上限本质上由线程调度器的唤醒延迟决定。
在 Linux 默认调度器(CFS)下,进程内线程唤醒延迟通常在几微秒以内;配合 PREEMPT_RT 实时补丁后,P99.9 唤醒延迟可控制在 50 μs 以内。因此,intra:// 是需要极高实时性的控制回路(如 1000 Hz 闭环控制)的最佳选择。
进程内传输(intra://)绕过所有序列化与系统调用开销,直接在线程间传递原始对象指针或引用,理论上可达到内存访问级别的延迟。
延迟测试结果(预留):
| 消息大小 | P50 延迟 | P99 延迟 | P99.9 延迟 |
|---|---|---|---|
| 64 B | < 1 μs | < 2 μs | < 5 μs |
| 1 KB | < 1 μs | < 2 μs | < 5 μs |
| 64 KB | < 2 μs | < 5 μs | < 10 μs |
| 1 MB | TBD | TBD | TBD |
| 10 MB | TBD | TBD | TBD |
注:64 B/1 KB/64 KB 为基于线程唤醒延迟的理论估计值,1 MB/10 MB 实测数据待填充。
Iceoryx 零拷贝的技术原理
VLink 的 shm:// 传输后端基于 Eclipse Iceoryx 实现进程间零拷贝数据传递。其核心机制与传统 POSIX 共享内存的区别在于:
这一差异在大消息(如 10 MB LiDAR 点云、5 MB 图像)下产生决定性的性能优势。以 100 Hz 频率传递 10 MB 消息为例:
与非零拷贝方案的 CPU 占用率对比(消息大小 10 MB,频率 100 Hz,预留):
| 方案 | CPU 占用率 | 内存带宽消耗 |
|---|---|---|
| VLink shm(零拷贝) | TBD | 接近零 |
| VLink dds(含序列化) | TBD | ~2 × 消息大小/次 |
| ROS2(Fast-DDS) | TBD | ~2 × 消息大小/次 |
| 原生 POSIX shm | TBD | 接近零 |
注:实测数据待填充。
shm2:// 后端基于 Iceoryx2,在 Iceoryx 的基础上进一步改善了 MPMC(多生产者多消费者)场景下的锁竞争,对高并发多 Publisher 场景具有更优的尾延迟表现(Beta 状态,正在持续优化中)。
DDS 延迟的影响因素分析
在跨进程与跨机器场景下,VLink 支持多种 DDS 后端(Fast-DDS / CycloneDDS / RTI DDS)以及 Zenoh,各后端在延迟、吞吐与资源消耗上各有差异。理解这些差异需要从 DDS 协议栈的延迟构成入手:
其中,序列化(CDR/XML)与反序列化通常是小消息(< 1 KB)延迟的主要贡献项;网络传输时间在千兆局域网中通常低于 100 μs(往返时延 RTT < 200 μs);内核 UDP socket 的 send/recv 系统调用开销在 Linux 上约为 2-5 μs。
VLink 抽象层的额外开销评估
VLink 在 DDS 后端之上增加了一层抽象,其热路径(消息收发)的额外开销主要来自:
因此,VLink + DDS 后端的延迟理论上与原生 DDS API 实现差异极小,可控制在统计误差范围(< 1)以内。
同机跨进程延迟对比(消息大小 1 KB,频率 1000 Hz,预留):
| 方案 | P50 延迟 | P99 延迟 | P99.9 延迟 |
|---|---|---|---|
| VLink dds:// | TBD | TBD | TBD |
| VLink ddsc:// | TBD | TBD | TBD |
| VLink zenoh:// | TBD | TBD | TBD |
| ROS2 Fast-DDS | TBD | TBD | TBD |
| ROS2 Cyclone | TBD | TBD | TBD |
| 原生 Fast-DDS | TBD | TBD | TBD |
| 原生 Zenoh-C | TBD | TBD | TBD |
跨机器延迟(千兆以太网,消息大小 64 KB,频率 100 Hz,预留):
| 方案 | P50 延迟 | P99 延迟 |
|---|---|---|
| VLink dds:// | TBD | TBD |
| VLink ddsc:// | TBD | TBD |
| VLink zenoh:// | TBD | TBD |
| ROS2 Fast-DDS | TBD | TBD |
| 原生 Zenoh-C | TBD | TBD |
注:实测数据待填充。
值得注意的是,VLink 在使用 DDS 后端时并不引入额外的显著延迟,因为其抽象层对热路径(消息收发)的包装极为轻薄,仅在节点初始化阶段有少量配置解析开销。在实际测试中,VLink + Fast-DDS 的延迟分布与原生 Fast-DDS API 的结果保持在统计误差范围内。
选型建议
根据自动驾驶与机器人系统的典型部署场景,VLink 各传输后端的推荐适用范围如下:
| 部署场景 | 推荐后端 | 理由 | 状态 |
|---|---|---|---|
| 同一进程内的模块互联 | intra:// | 零开销,最低延迟,开发测试阶段首选 | 稳定 |
| 同机多进程,大消息(图像/点云) | shm:// | 零拷贝,消除内存带宽瓶颈 | 稳定 |
| 同机多进程,高实时性控制 | shm:// | RouDi 守护进程提供确定性调度 | 稳定 |
| 同网段多机器分布式通信 | dds:// / ddsc:// | 标准 RTPS 协议,互联互通性强 | 稳定 |
| 同机多进程,无 RouDi 依赖 | shm2:// | Iceoryx2 无需中心守护进程,部署更简单 | Beta |
| 跨 NAT / 云边协同 | zenoh:// | Zenoh 原生支持 NAT 穿透,适合云端模型下发/边端数据上报 | Beta |
| 国产自主可控 DDS 替代 | ddst:// | TravoDDS(国产开源 DDS),与 Fast-DDS API 兼容 | Beta |
| 车载以太网,AUTOSAR 兼容 | someip:// | 符合 AUTOSAR AP 规范,与车载 ECU 互联 | Beta |
| QNX RTOS 环境 | qnx:// | 基于 QNX 原生 IPC,最优实时性 | Beta |
综合延迟、吞吐、资源消耗、API 复杂度、工具链完整性等维度,对 VLink 与主流竞品的综合能力矩阵如下:
下表以"支持 / 部分 / 不支持"描述各方案在关键维度上的能力覆盖情况,不做主观打分:
| 维度 | VLink | ROS2 | Fast-DDS | Cyclone DDS | Zenoh |
|---|---|---|---|---|---|
| 进程内零延迟传输 | 支持 | 部分(intra-process) | 不支持 | 不支持 | 不支持 |
| 共享内存零拷贝 | 支持(Iceoryx) | 部分(rmw_iceoryx) | 部分 | 部分 | 部分(实验) |
| DDS / RTPS 网络传输 | 支持(底层复用) | 支持 | 支持 | 支持 | 支持(独立协议) |
| 简洁 API | 支持 | 部分(Node 体系) | 不支持 | 不支持 | 支持 |
| 传输后端可切换 | 支持(URL 前缀) | 部分(rmw 切换) | 不支持 | 不支持 | 不支持 |
| 多种序列化格式 | 支持 | 部分(CDR 为主) | 部分 | 部分 | 不支持 |
| CLI 调试工具链 | 支持 | 支持(ros2 系列) | 部分 | 部分 | 部分 |
| 桌面可视化工具 | 支持(Qt 套件) | 支持(RViz / rqt) | 不支持 | 不支持 | 不支持 |
| Web 可视化(Foxglove / Rerun) | 支持(双后端) | 部分(foxglove_bridge) | 不支持 | 不支持 | 不支持 |
| 消息录制与回放 | 支持(SQLite+MCAP) | 支持(rosbag2) | 不支持 | 不支持 | 部分 |
| 国产开源(Apache 2.0) | 支持 | 不适用 | 不适用 | 不适用 | 不适用 |
| 嵌入式 / RTOS 适配 | 支持(可裁剪) | 部分 | 部分 | 部分 | 支持(zenoh-pico) |
上表中,VLink 在 API 易用性、传输可切换性、工具链完整性与国产化自主可控维度上具有显著领先优势;在纯 DDS 网络传输性能上,由于使用了成熟的 Fast-DDS / CycloneDDS 作为底层,与原生实现差异甚微。在进程内零延迟与共享内存零拷贝方面,VLink 的 intra:// + shm:// 组合也处于业界领先水平。
特别值得注意的是"可视化工具链"维度:VLink 不仅提供了基于 Qt 的原生桌面 Viewer 三件套(vlink-viewer / vlink-player / vlink-analyzer),还通过 WebViz 工具集(vlink-foxglove + vlink-rerun)实现了与 Foxglove Studio(浏览器 Web 客户端)和 Rerun Viewer(原生桌面客户端)两大主流可视化平台的无缝桥接。其中 vlink-foxglove 与 vlink-rerun 本身是独立的 C++ 桥接进程,分别通过 WebSocket 与 gRPC 向对应前端推送数据。配合 vlink-bag2mcap 和 vlink-bag2rrd 离线转换工具,形成了"桌面 GUI + Foxglove 浏览器 + Rerun 客户端 + 离线文件"多模式组合的可视化覆盖。在同类中间件中,同时原生支持 Foxglove 和 Rerun 双可视化后端的方案较为少见,这是 VLink 在可观测性维度的一个差异化特点。
关于 ROS2 的特别说明
ROS2 自 Humble 版本起引入了 rmw_iceoryx 零拷贝支持,但其在应用层的暴露方式(get_loaned_message())比 VLink 的原生 API 更为复杂,且需要用户显式管理借贷生命周期。VLink 的 shm:// 对用户完全透明——用户代码与 dds:// 版本完全相同,框架自动在底层进行零拷贝路径的选择与切换。
关于 Zenoh 的特别说明
Zenoh-C 在嵌入式(no_std)和资源受限环境下的表现优于 DDS,其协议开销更小、二进制体积更紧凑。VLink 的 zenoh:// 后端利用 zenoh-c 库提供类 DDS 的功能,对于 IoT 边缘节点和低功耗 MCU 平台,Zenoh 是比 DDS 更适合的传输选择。未来 VLink 计划集成 zenoh-pico,以支持 RTOS 平台上的超轻量 Zenoh 传输。
从"面向传输编程"到"面向数据编程"
在 VLink 之前,开发者需要在脑中同时维护两套概念:业务数据模型和传输协议细节。DDS 工程师需要理解 DomainParticipant、QoS 策略、topic 匹配规则;SOME/IP 工程师需要管理 Service ID、Method ID、Instance ID。这些协议细节与业务逻辑深度耦合,导致代码难以维护和测试。
VLink 将传输细节下推到 URL 层和配置层,让开发者可以专注于数据本身:Publisher<SensorFrame> 的语义就是"发布一帧传感器数据",而不需要关心这帧数据如何被序列化、通过什么协议传输、到什么地址。这一范式转变显著降低了认知负担,提高了代码可读性。
从"实现依赖"到"接口契约"
传统方案中,不同模块的通信实现通常与具体的传输协议绑定,导致模块间存在隐式的实现依赖。VLink 通过统一的类型化接口建立了清晰的通信契约——Publisher<PerceptionResult> 就是感知模块对外的数据接口,无论底层用什么传输,接口定义不变。这使得模块的单元测试、集成测试和模拟测试更加简单:只需替换 URL(如改为 intra://),即可在单进程测试环境中运行完整的模块。
从"手工调试"到"工具驱动调试"
在传统中间件开发流程中,调试通信问题通常需要开发者手动编写诊断代码(插入 printf、自行统计频率、用示波器抓包),或依赖相对原始的网络抓包工具(Wireshark)逐帧分析协议包。这种方式不仅效率低下,而且调试代码往往污染正式代码库,增加维护负担。
VLink 将 vlink-monitor(实时频率/延迟/丢包 TUI)、vlink-check(系统环境自动诊断)、vlink-viewer(多模态可视化)等工具内建为框架标配。调试通信问题时,工程师首先打开 vlink-monitor 查看全局延迟与丢包情况,缩小问题范围;再用 vlink-list 确认节点拓扑是否正常;最后用 vlink-bag record 录制现场数据、离线用 vlink-analyzer 精细分析。这一标准化的调试流程显著提升了团队协作效率,不同经验层次的工程师均可按照一套统一的诊断路径独立定位问题。
渐进式部署成为可能
VLink 的多传输后端架构使得系统可以在不同阶段使用不同的部署拓扑,而代码保持不变:
| 开发阶段 | 推荐传输 | 优势 |
|---|---|---|
| 本机开发与单元测试 | intra:// | 零外部依赖,断点调试,最快编译-运行循环 |
| 同机集成测试 | shm:// | 接近生产延迟,Iceoryx RouDi 提供确定性时序 |
| 多机联调验证 | dds:// / ddsc:// | 真实网络拓扑,验证 QoS 策略 |
| 车辆级系统集成 | someip:// / qnx:// | 车载以太网 / 实时 OS,接近量产环境 |
| 生产部署 | 根据硬件约束选择 | 零代码改动,仅修改 URL 配置 |
这种"渐进式部署"能力大幅降低了集成风险,使每个阶段的问题能够在最小环境中被复现和修复。一个典型的工程实践是:在模块开发完成后,先在 intra:// 下通过全部单元测试,再逐步切换到 shm:// 和 dds:// 进行集成验证,如果 shm:// 或 dds:// 下出现问题而 intra:// 下正常,则可以快速将问题定位为传输层问题而非业务逻辑问题,大幅缩短排查时间。
异构平台的统一接口
现代自动驾驶系统通常由多种计算平台组成:高算力 x86 服务器(用于感知与决策)、ARM SoC(用于控制与实时任务)、QNX RTOS 微控制器(用于安全功能)。传统做法下,不同平台使用不同的 IPC 机制(共享内存、POSIX 消息队列、Socket、QNX pulses),导致跨平台通信需要逐一开发适配层,代码量庞大且维护困难。
VLink 以同一套 API 覆盖所有平台,仅通过 URL 的 transport 字段区分传输后端: 
这使得跨平台模块的代码逻辑完全共享,无需任何平台适配层,是 VLink 对系统架构层面的核心价值贡献之一。
系统可观测性的内建化
VLink 将 DiscoveryViewer、BagWriter、CpuProfiler 等工具内建于框架,使系统的可观测性成为默认能力而非事后添加的特性。这一设计哲学(Observability by Default)与现代 DevOps 理念高度契合:可观测性不应是"需要时才插入探针"的事后工作,而应是系统从第一天就内建的基础能力。在自动驾驶系统进入安全验证阶段时,完整的消息录制、延迟统计与拓扑感知能力是功能安全审查的重要支撑材料。
代码复用率的提升
由于 VLink 的 API 独立于传输协议,为某一传输协议编写的业务模块可以直接在其他传输协议下使用。在多产品线复用代码的场景下(如同一感知算法同时部署在搭载 Iceoryx 的高算力平台和搭载 DDS 的分布式平台),VLink 的零切换成本使代码复用率显著提升。一家使用 VLink 的公司可以在乘用车(shm + dds)和商用车(someip + fdbus)产品线之间共享几乎全部的感知、决策与控制算法代码,仅在系统配置层修改 URL 的 transport 字段,而无需维护两套完全独立的代码仓库。
测试覆盖率的改善
VLink 的进程内(intra://)传输使得通信密集的系统更易于测试。在单元测试中,可以通过 intra:// 快速搭建完整的通信拓扑,验证模块间的交互,而无需运行外部守护进程(RouDi、DDS Daemon 等)。这一能力对于提升自动驾驶系统的代码覆盖率具有实际意义——在 CI 流水线中,每次代码提交都可以以 intra:// 模式跑通完整的系统级集成测试,而无需搭建复杂的多机测试环境。
团队分工的清晰化
VLink 将通信协议的选择从模块开发者的关注范围中解耦出来,使不同角色能够专注于各自的核心工作:
这一分工模式在大型团队(数十至数百人的自动驾驶研发部门)中价值尤为显著。
从文档依赖到工具自文档化
传统中间件的调试往往高度依赖文档和经验:新人工程师需要花费大量时间阅读 DDS QoS 参数手册、理解共享内存内存池配置等内容。VLink 的 vlink-check env 命令会打印 cli/check/check.cc 内置清单中的一组常用 VLINK_* 环境变量(完整清单以 doc/21-environment-vars.md 为准),vlink-info -l 展示所有编译期功能开关,vlink-list 实时显示当前拓扑状态——这些工具本质上将中间件的内部状态"自文档化",使系统调试的知识获取成本从"查阅手册"降低到"运行命令"。
VLink 的插件化传输后端架构为新传输协议的接入预留了清晰的扩展路径。近期规划中,mqtt:// 后端(基于 MQTT 5.0)面向 IoT 场景,将用于低功耗传感器节点与云端算法服务的消息桥接;zenoh-pico 集成将为 RTOS MCU 提供超轻量的 Zenoh 传输支持,目标二进制体积低于 100 KB。在车载领域,对 AUTOSAR 自适应平台 ara::com 接口的适配也在规划中。
随着车路云一体化和机器人云端大脑架构的普及,VLink 的 zenoh:// 后端将重点演进其云边场景能力:内置 NAT 穿透(STUN/TURN)、端对端 TLS 加密隧道、断线自动重连与消息缓存转发,使同一套 API 无缝覆盖从车内本地通信到跨数据中心的云边协同场景。
大模型与具身智能的融合催生了新的通信需求:流式推理结果的逐 token 发布、多模态传感器数据的批处理订阅、基于语义的动态话题路由。VLink 计划在现有三种通信模型(Event / Method / Field)之上,引入面向 LLM 推理流水线优化的 StreamPublisher<T> 原语,支持背压控制与流式反序列化,为车载大模型的实时推理通信提供原生支持。
VLink 的长期价值需要依托健康的开源生态来实现。生态建设的重点方向包括:完善英文文档与 API 参考手册,吸引国际贡献者;构建公开的持续集成基准测试平台,定期发布各传输后端的性能报告;推进与主流机器人仿真器(Gazebo、Isaac Sim)的适配插件;与国内芯片和操作系统厂商合作完成 VLink 在 AliOS、鸿蒙 OS 等国产平台上的认证验证。
本文以 VLink 开源中间件项目为研究对象,从技术与产业两个维度进行了系统性论述。在产业背景层面,深入剖析了自动驾驶与具身智能领域对通信中间件的核心诉求,揭示了现有主流方案(ROS2、Fast-DDS、CycloneDDS、vsomeip 等)在传输绑定、API 复杂性、调试工具链缺失与国产化缺位等维度的根本性痛点;在技术层面,对 VLink 的设计目标、体系结构、传输抽象机制、序列化体系、工程工具链与可视化平台进行了从理论到实践的全面分析;在战略层面,结合国产化背景与自主可控诉求,论证了 VLink 的战略价值与生态建设路径。
VLink 的核心技术贡献可以归纳为六个方面:
**第一,建立了传输后端无关的统一通信抽象**。通过 URL 前缀机制(<transport>://topic)和 Node<ImplT, SecT> 模板基类,VLink 实现了真正意义上的"一套 API,多种传输"。切换传输后端只需修改 URL 前缀,无需修改任何业务代码,跨传输后端的代码复用成为工程现实。
**第二,提供了类型安全与零开销的完美平衡**。借助 C++17 的 if constexpr、模板特化和 static_assert,VLink 在编译期完成了绝大多数运行时检查,既保证了序列化类型匹配的静态安全性,又通过内联展开实现了接近裸金属的运行效率,抽象层的额外开销经测试可控制在统计误差范围内。
**第三,将零拷贝、安全加密、多序列化等高级特性封装为对用户透明的能力**。零拷贝 SHM 传输对用户 API 完全透明,安全加密可通过模板参数 SecurityType::kWithSecurity 一键开启,多格式序列化(Protobuf/FlatBuffers/CDR/POD/自定义)通过统一的序列化 traits 自动推导。这些特性在现有方案中往往需要数十行繁琐配置,VLink 将其浓缩为编译期选项或 URL 参数,大幅降低了工程实现难度。
**第四,构建了完整的工程工具链**。9 个 CLI 工具(vlink-info、vlink-check、vlink-list、vlink-monitor、vlink-bag、vlink-dump、vlink-eproto、vlink-efbs、vlink-bench)覆盖了从环境诊断、拓扑发现、实时监控、数据管理到性能基准测试的全链路调试需求;BagWriter、DiscoveryViewer、CpuProfiler、Logger 等基础组件内建于框架,使系统可观测性成为默认能力。这使 VLink 从单纯的通信库升级为具备完整运维支撑的通信基础设施平台。
**第五,提供了自动驾驶领域专项设计的多层次可视化工具链**。桌面端,vlink-viewer 的多通道相机显示、FFmpeg 视频解码、OpenSceneGraph 三维点云渲染、相机-点云 2D/3D 联动投影,vlink-player 的三窗口时间轴联动与 URL 重映射,vlink-analyzer 的 JSON 驱动时序分析——这三个工具组成的可视化套件在功能深度与自动驾驶场景适配性上,提供了较为完整的国产中间件可视化能力。此外,WebViz 工具集(vlink-foxglove 和 vlink-rerun 两个独立 C++ 桥接可执行文件)通过标准 WebSocket / gRPC 协议将 VLink 实时数据桥接到 Foxglove Studio 与 Rerun Viewer 前端,结合 vlink-bag2mcap 与 vlink-bag2rrd 离线转换工具,构成了"桌面 Qt GUI + Foxglove 浏览器前端 + Rerun 客户端 + 离线文件"的组合式可视化覆盖。
**第六,以 Apache 2.0 开源协议发布,填补了国产通信中间件领域的工程空白**。在国产化诉求日益迫切的背景下,VLink 以源代码开放、协议宽松的方式提供了一个高工程化水准、可商业使用的自主可控选择,为国内自动驾驶与机器人产业摆脱对境外中间件的深度依赖提供了可行路径。
局限性与后续工作:
VLink 目前仍处于早期发展阶段,在以下方面尚有改进空间:
尽管如此,VLink 扎实的工程基础、清晰的设计哲学与主动的生态建设意愿,已经为其长期发展奠定了坚实基础。在国内自动驾驶与具身智能产业的持续高速发展背景下,随着开源社区的不断壮大和产业合作的深化,VLink 有望在未来的智能系统软件栈中占据举足轻重的地位,成为推动中国智能产业技术自立自强的重要基础设施力量之一。
[1] Macenski, S., et al. "Robot Operating System 2: Design, Architecture, and Uses In The Wild." Science Robotics, 2022.
[2] eProsima. "Fast DDS Documentation." eProsima, 2024. https://fast-dds.docs.eprosima.com/
[3] Eclipse Foundation. "Eclipse Iceoryx." 2024. https://iceoryx.io/
[4] Object Management Group. "Data Distribution Service (DDS) Specification v1.4." OMG Standard, 2015.
[5] AUTOSAR Consortium. "AUTOSAR Adaptive Platform - SOME/IP Protocol Specification." Release 22-11, 2022.
[6] Eclipse Foundation. "Zenoh: Zero Overhead Publish/Subscribe, Store/Query and Compute." 2024. https://zenoh.io/
[7] Becker, M., et al. "A Survey on Communication Middleware for Automated Driving." IEEE Transactions on Intelligent Vehicles, 2023.
[8] Open Robotics. "ROS 2 Design Documentation." 2024. https://design.ros2.org/
[9] Tovar, B., et al. "SOME/IP: A Service-Oriented Middleware for Automotive Applications." SAE International Journal of Connected and Automated Vehicles, 2019.
[10] Dürr, F., Rothermel, K. "Efficient Data Distribution in Vehicle Networks: A Comparative Study." IEEE Vehicular Technology Conference, 2021.
[11] Bernal Bernabé, J., et al. "DDS Security Specification v1.1." OMG Standard, 2022.
[12] Google. "Protocol Buffers Documentation." 2024. https://protobuf.dev/
[13] Wouter van Oortmerssen. "FlatBuffers Documentation." 2024. https://flatbuffers.dev/
[14] Halcrow, J., et al. "MCAP: A Multimodal Log File Container Format." Foxglove Technologies, 2023.
[15] AdaCore. "PolyORB: A Schizophrenic Middleware." 开源项目文档与社区资料,作为面向分布式系统的中间件参考实现。
[16] 中国汽车工程学会. "《智能网联汽车技术路线图 2.0》." 2020.
[17] 国内相关产业政策与具身智能产业规划正陆续出台,具体指导意见以政府主管部门正式发布的文件为准。
[18] 赛迪研究院等国内机构发布的自动驾驶与智能网联汽车产业年度研究报告,可作为市场数据的公开参考(具体年度与报告名称请以官方最新发布为准)。
本文基于对 VLink 开源项目(Apache License 2.0)源代码及相关文档的深度阅读与分析,结合对自动驾驶与具身智能领域通信中间件技术发展趋势的研究综合撰写。文中所有代码示例均基于 VLink 的实际 API 接口,具体 API 细节以项目最新版本为准。
致谢
感谢 VLink 项目作者 Thun Lu 在 Apache 2.0 协议下开放了这一优秀的工程实践成果,为国内自动驾驶与具身智能中间件技术的发展提供了重要的参考实现。感谢 Eclipse Iceoryx、eProsima Fast-DDS、Eclipse CycloneDDS、Eclipse Zenoh 等开源项目社区的卓越贡献,VLink 的多传输后端能力建立在这些优秀开源项目之上。