字段模型是 VLink 三种通信模型之一,用于在节点之间**同步最新状态值**。Node 基类的通用 API(init / deinit / attach / set_property 等)请参阅 节点基类与生命周期。
目录
- 概念介绍
- 与 Event 模型的区别
- 适用场景
- Setter<T> 完整 API
- Getter<T> 完整 API
- std::optional<T> 返回值说明
- 完整使用示例
- 多 Getter 读取同一 Setter
- 安全模式
- 性能特性
概念介绍
字段模型(Field Model)是 VLink 三大通信模型之一,用于在节点之间**同步最新状态值**。 与事件模型(Event Model)不同,字段模型不关心历史消息队列,只维护一个"当前最新值"。
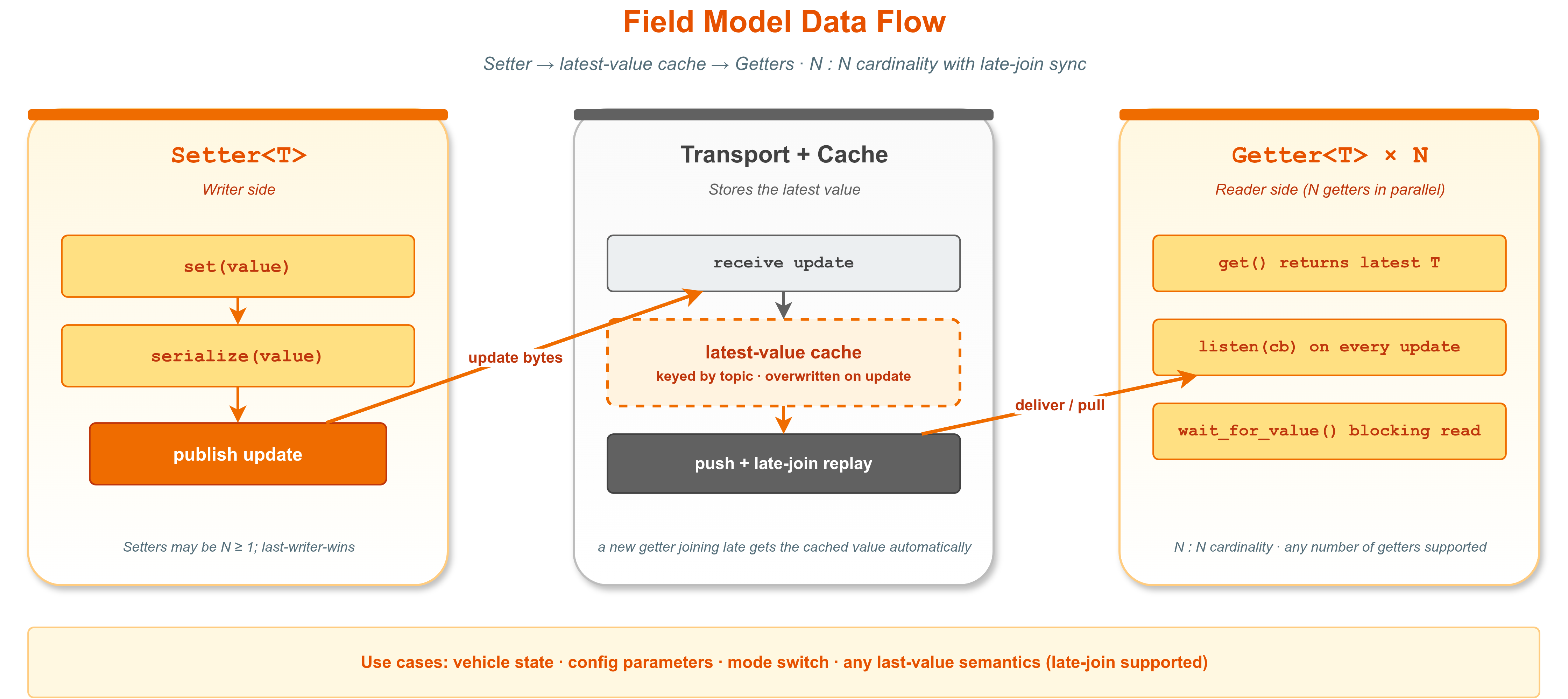
字段模型数据流
核心特性:
- **最新值缓存**:Setter 每次调用 set() 都会将新值存入内部缓存,并广播给所有已连接的 Getter。
- **迟到 Getter 自动同步**:当一个 Getter 在 Setter 已经写值后才连接时,传输层会触发 sync() 回调,Setter 自动将缓存值重新发送给新连接的 Getter,使其立即获得当前状态。
- **轮询或监听两种读取方式**:Getter 支持 get()(主动轮询)和 listen()(被动回调)两种读取方式,也支持阻塞等待 wait_for_value()。
- **变化过滤**:Getter 支持 set_change_reporting(true),当新值与上次相同时(原始字节比较),不触发回调,降低 CPU 占用。
与 Event 模型的区别
三种通信模型的对比请参阅 Event 模型 第 1 节。
字段模型与事件模型的核心区别在于:字段模型维护**最新值缓存**,迟到的 Getter 通过 sync 机制可立即获得当前值;而事件模型不保留历史消息,迟到的 Subscriber 会错过已发布的消息。
适用场景
字段模型非常适合以下场景:
1. 配置参数同步
Setter<int> max_speed_setter("shm://config/max_speed");
max_speed_setter.set(120);
Getter<int> max_speed_getter("shm://config/max_speed");
if (auto v = max_speed_getter.get()) {
use_max_speed(*v);
}
2. 传感器最新值
Setter<float> speed_setter("dds://vehicle/speed");
speed_setter.set(current_speed_kph);
Getter<float> speed_getter("dds://vehicle/speed");
speed_getter.listen([](float v) {
apply_speed_control(v);
});
3. 系统状态同步
Setter<bool> system_ready_setter("shm://system/ready");
system_ready_setter.set(true);
Getter<bool> ready_getter("shm://system/ready");
if (ready_getter.wait_for_value()) {
if (ready_getter.get().value_or(false)) {
start_work();
}
}
4. HMI 显示最新数据
Setter<DashboardData> dash_setter("dds://hmi/dashboard");
Getter<DashboardData> dash_getter("dds://hmi/dashboard");
dash_getter.set_change_reporting(true);
dash_getter.listen([](const DashboardData& d) {
refresh_display(d);
});
Setter<T> 完整 API
类声明
template <typename ValueT, SecurityType SecT = SecurityType::kWithoutSecurity>
class Setter : public Node<SetterImpl, SecT>;
- ValueT:字段值类型,必须满足 Serializer::is_supported()。
- SecT:安全模式,默认无安全加密。
类型别名
| 别名 | 类型 | 说明 |
| UniquePtr | std::unique_ptr<Setter<ValueT, SecT>> | unique_ptr 别名 |
| SharedPtr | std::shared_ptr<Setter<ValueT, SecT>> | shared_ptr 别名 |
静态常量
| 常量 | 类型 | 值 | 说明 |
| kImplType | ImplType | kSetter | 节点角色标识 |
| kValueType | Serializer::Type | 编译期推断 | ValueT 对应的序列化类型枚举 |
工厂方法
[[nodiscard]] static UniquePtr create_unique(
const std::string& url_str,
InitType type = InitType::kWithInit);
[[nodiscard]] static SharedPtr create_shared(
const std::string& url_str,
InitType type = InitType::kWithInit);
构造函数
explicit Setter(const std::string& url_str,
InitType type = InitType::kWithInit);
template <typename ConfT, typename = std::enable_if_t<std::is_base_of_v<Conf, ConfT>>>
explicit Setter(const ConfT& conf,
InitType type = InitType::kWithInit);
InitType::kWithInit(默认)表示构造时立即调用 init() 完成初始化;若传入 kWithoutInit,需手动调用 init()。
核心方法
void set(const ValueT& value);
set() 内部行为:
- 加互斥锁,将 value 存入内部 value_ 缓存。
- 释放互斥锁。
- 在锁外把值序列化为 Bytes(若启用安全,再对序列化结果加密)。
- 通过传输层写入,通知所有已连接的 Getter。
当新 Getter 连接时,传输层触发 sync() 回调,Setter 重新发送缓存的 value_,确保新连接者立即获得当前值。
角色切换方法
void mark_as_publisher();
Getter<T> 完整 API
类声明
template <typename ValueT, SecurityType SecT = SecurityType::kWithoutSecurity>
class Getter : public Node<GetterImpl, SecT>;
类型别名
| 别名 | 类型 | 说明 |
| UniquePtr | std::unique_ptr<Getter<ValueT, SecT>> | unique_ptr 别名 |
| SharedPtr | std::shared_ptr<Getter<ValueT, SecT>> | shared_ptr 别名 |
| MsgCallback | std::function<void(const ValueT&)> | 值变更回调函数类型 |
静态常量
| 常量 | 类型 | 值 | 说明 |
| kImplType | ImplType | kGetter | 节点角色标识 |
| kValueType | Serializer::Type | 编译期推断 | ValueT 对应的序列化类型枚举 |
工厂方法
[[nodiscard]] static UniquePtr create_unique(
const std::string& url_str,
InitType type = InitType::kWithInit);
[[nodiscard]] static SharedPtr create_shared(
const std::string& url_str,
InitType type = InitType::kWithInit);
构造函数
explicit Getter(const std::string& url_str,
InitType type = InitType::kWithInit);
template <typename ConfT, typename = std::enable_if_t<std::is_base_of_v<Conf, ConfT>>>
explicit Getter(const ConfT& conf,
InitType type = InitType::kWithInit);
读取方法
[[nodiscard]] std::optional<ValueT> get() const;
bool wait_for_value(
std::chrono::milliseconds timeout = Timeout::kDefaultInterval);
监听方法
bool listen(MsgCallback&& callback);
配置方法
void set_change_reporting(bool enable);
[[nodiscard]] bool get_change_reporting() const;
change_reporting 的比较基于原始序列化字节,由 last_cache_ 成员保存。线程安全由 Getter 内部的 std::mutex mtx_ 保证。
void set_manual_unloan(bool manual_unloan) override;
void set_latency_and_lost_enabled(bool enable);
统计/诊断方法
[[nodiscard]] bool is_latency_and_lost_enabled() const;
[[nodiscard]] int64_t get_latency() const;
[[nodiscard]] SampleLostInfo get_lost() const;
继承自 Node 的公共 API
Node 基类继承的公共 API(init / deinit / attach / interrupt / set_security_key 等)请参阅 节点基类与生命周期。
角色切换方法
void mark_as_subscriber();
std::optional<T> 返回值说明
Getter::get() 返回 std::optional<ValueT>,而非直接返回 ValueT。这是因为 Getter 在初始化后、Setter 首次写入值之前处于"无值状态"。
Getter<int> getter("shm://my_field");
auto v = getter.get();
if (!v.has_value()) {
}
auto v = getter.get();
if (v) {
int current = *v;
int current2 = v.value();
}
int val = getter.get().value_or(0);
if (getter.wait_for_value(std::chrono::seconds(5))) {
int val = *getter.get();
}
注意事项:
- get() 是线程安全的(内部持有互斥锁)。
- get() 每次调用都会深拷贝内部缓存值,对于大型消息类型(如 Protobuf),需考虑调用频率。
- 若只需在值变化时触发动作,优先使用 listen() 回调而非频繁轮询 get()。
完整使用示例
示例 1:基础 Setter / Getter(轮询方式)
#include <thread>
#include <chrono>
#include <iostream>
using namespace std::chrono_literals;
int main() {
setter.set(60.5f);
std::this_thread::sleep_for(10ms);
if (auto v = getter.get()) {
std::cout << "当前车速: " << *v << " km/h" << std::endl;
} else {
std::cout << "暂无值" << std::endl;
}
return 0;
}
Type-safe field reader for the VLink field communication model.
Definition getter.h:105
Type-safe field writer for the VLink field communication model.
Definition setter.h:91
示例 2:listen 回调方式(变化监听)
#include <thread>
using namespace std::chrono_literals;
int main() {
getter.set_change_reporting(true);
getter.listen([](const int& v) {
});
std::thread writer([&setter]() {
setter.set(3);
std::this_thread::sleep_for(500ms);
setter.set(3);
std::this_thread::sleep_for(500ms);
setter.set(5);
});
writer.join();
return 0;
}
#define VLOG_I(...)
Definition logger.h:850
示例 3:wait_for_value 阻塞等待
#include <thread>
#include <iostream>
using namespace std::chrono_literals;
int main() {
std::thread reader([&getter]() {
std::cout << "等待配置版本..." << std::endl;
if (getter.wait_for_value(10000ms)) {
auto v = getter.get();
std::cout << "配置版本: " << v.value_or("unknown") << std::endl;
} else {
std::cout << "等待超时" << std::endl;
}
});
std::this_thread::sleep_for(2s);
setter.set("v2.1.0");
reader.join();
return 0;
}
示例 4:Protobuf 类型的字段模型
#include "vehicle_state.pb.h"
int main() {
vehicle::State state;
state.set_speed(80.0f);
state.set_gear(3);
state.set_engine_running(true);
state_setter.set(state);
state_getter.listen([](const vehicle::State& s) {
if (s.speed() > 100.0f) {
trigger_speed_warning();
}
});
if (auto v = state_getter.get()) {
std::cout << "Speed: " << v->speed() << std::endl;
}
return 0;
}
示例 5:使用配置对象(ShmConf)
int main() {
ShmConf::init_runtime("my_app");
ShmConf setter_conf("vehicle/gear", "", 0, 0, 1);
setter.set(2);
ShmConf getter_conf("vehicle/gear", "", 0, 0, 1);
if (auto v = getter.get()) {
std::cout << "Gear: " << *v << std::endl;
}
ShmConf::deinit_runtime();
return 0;
}
Transport configuration for the shm:// Iceoryx shared-memory backend.
示例 6:Bytes 类型的字段模型(含安全加密)
int main() {
setter.set_security_key("my_secret_key");
setter.set(
Bytes{0xA, 0xB, 0xC});
getter.set_security_key("my_secret_key");
if (auto ret = getter.get()) {
VLOG_I(
"Getter value:", ret.value());
}
return 0;
}
Versatile 128-byte byte buffer with SBO, five ownership modes and compression helpers.
Definition bytes.h:113
Convenience alias for Getter with message security enabled.
Definition getter.h:315
Convenience alias for Setter with message security enabled.
Definition setter.h:218
多 Getter 读取同一 Setter
字段模型天然支持 **N:N 拓扑**:同一 URL 可以有多个 Setter 和多个 Getter;最常见的形态是一个 Setter 对应多个 Getter。无论 Getter 何时连接,都能通过 sync 机制立即获得当前值:
#include <thread>
#include <vector>
using namespace std::chrono_literals;
int main() {
temp_setter.set(25.6);
auto start_getter = [](int id) {
std::this_thread::sleep_for(std::chrono::milliseconds(id * 100));
if (getter.wait_for_value(1000ms)) {
auto v = getter.get();
VLOG_I(
"Getter",
id,
"收到温度:", v.value_or(-1.0));
}
};
std::vector<std::thread> threads;
for (int i = 1; i <= 3; ++i) {
threads.emplace_back(start_getter, i);
}
for (auto& t : threads) {
t.join();
}
return 0;
}
关键点:
- 每个 Getter 实例独立维护自己的内部值缓存和回调。
- 多 Getter 并发调用 get() 是线程安全的(各自有独立的互斥锁)。
- 若 Setter 在多 Getter 运行期间持续 set(),每个 Getter 的 listen() 回调均独立触发。
- 若启用 set_change_reporting(true),每个 Getter 实例独立判断是否"变化"(基于各自的 last_cache_)。
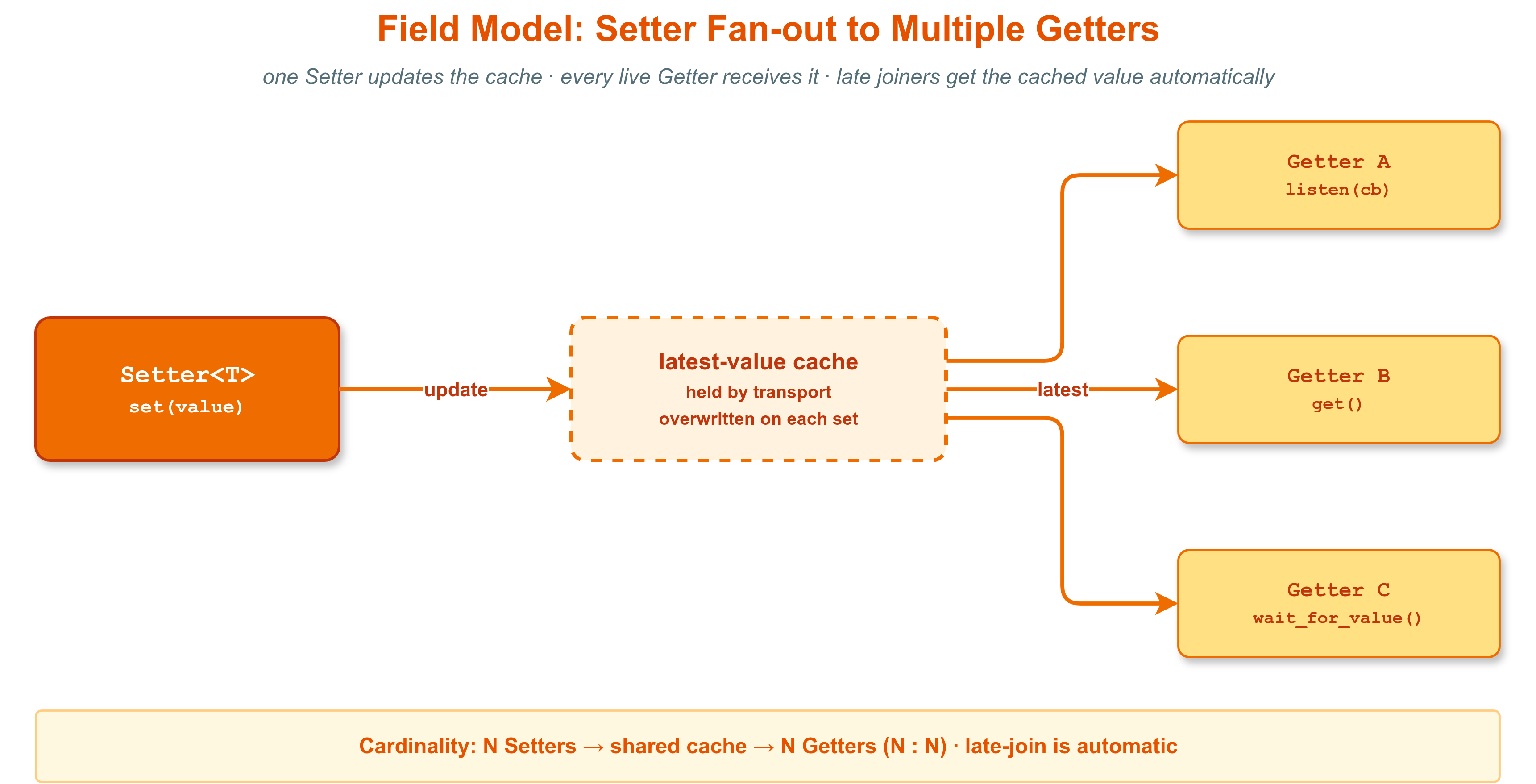
多 Getter 扇出模式
安全模式
template <typename ValueT>
template <typename ValueT>
setter.set_security_key("my_32byte_aes_key");
getter.set_security_key("my_32byte_aes_key");
完整安全加密配置请参阅 安全加密。
性能特性
| 指标 | 说明 |
| 延迟 | 取决于传输后端:shm:// 微秒级,dds:// 百微秒至毫秒级 |
| get() 开销 | 一次互斥锁 + 值拷贝;大型消息频繁轮询时注意拷贝开销 |
| listen() 开销 | 回调在传输线程执行,避免在回调中做耗时阻塞操作 |
| set_change_reporting | 启用后增加每次到达时的字节级比较开销,但可大幅减少回调触发次数 |
| 迟到 Getter 同步 | sync 重发一次缓存值,开销等同于一次普通 set() 调用 |
| 内存 | Getter 内部 value_ 为 std::optional<ValueT>,生命期内始终持有最新值 |
| 线程安全 | get()、set()、listen() 均线程安全(内部互斥锁保护) |
性能建议:
- 对于高频更新(> 1kHz)的字段,优先使用 shm:// 或 intra:// 后端(intra:// 支持字段模型,且延迟最低,但仅限同进程内使用)。
- 若多模块只需在值变化时响应,使用 listen() + set_change_reporting(true) 比定时轮询 get() 效率更高。
- 对于 POD 类型(如 int、float、简单结构体),set()/get() 开销极低,几乎等同于内存拷贝。
- 若需要延迟监控,调用 set_latency_and_lost_enabled(true) 后通过 get_latency() 获取微秒级端到端延迟。
相关文档