VLink 的零拷贝能力分布在两个正交的层次:
- **传输层零拷贝(loan)**:shm://(Iceoryx)和 shm2://(Iceoryx2)默认实现; zenoh:// 在显式启用 SHM(?shm=1 或 VLINK_ZENOH_SHM=1)且编译期带 Z_FEATURE_SHARED_MEMORY + Z_FEATURE_UNSTABLE_API 时也提供 loan 接口。 Publisher 直接向共享内存池借出的缓冲区写数据,Subscriber 通过指针收到同一块内存。 其他后端(intra、dds、ddsc 等)不支持 loan,is_support_loan() 返回 false。
- **容器层零拷贝(zerocopy 结构体)**:vlink::zerocopy 命名空间下的 5 个结构体 (RawData、CameraFrame、PointCloud、ProxyData、Header)支持"借用"语义—— 反序列化时内部指针直接指向 Bytes 缓冲区,不复制负载数据。
两个层次可独立或组合使用:同一个 CameraFrame 可以通过 shm:// 做双层零拷贝, 也可以通过 dds:// 做单层(仅容器反序列化借用)。
相关文档:
适用场景
Header 结构体
头文件:include/vlink/zerocopy/header.h
Header 是 40 字节 POD,嵌入在 RawData、CameraFrame、PointCloud 中作为 公有成员 header。ProxyData 不包含 Header(它有自己的控制字段)。 结构体声明为 VLINK_EXPORT_AND_ALIGNED(8),64 位平台通过 static_assert 校验 sizeof(Header) == 40。
内存布局与字段
| 偏移 | 大小 | 字段 | 类型 | 说明 |
| 0 | 16 | frame_id | char[16] | 帧标识符字符串,默认 "unknown" |
| 16 | 4 | seq | uint32_t | 单调递增序列号,绕回 UINT32_MAX |
| 20 | 4 | reserved | uint32_t | 保留,须置 0 |
| 24 | 8 | time_meas | uint64_t | 采集时间戳(纳秒,自 epoch) |
| 32 | 8 | time_pub | uint64_t | 发布时间戳(纳秒,自 epoch) |
双时间戳用途
- time_pub - time_meas:从传感器采集到发布出去的处理延迟。
- 订阅端接收时间 - time_pub:传输延迟。
vlink::zerocopy::Header hdr;
hdr.seq = frame_counter++;
std::strncpy(hdr.frame_id, "cam_front", sizeof(hdr.frame_id) - 1);
hdr.time_meas = capture_timestamp_ns;
hdr.time_pub = vlink::MessageLoop::get_current_nano_time();
RawData 类
头文件:include/vlink/zerocopy/raw_data.h
RawData 是最简单的零拷贝容器,封装非类型化字节缓冲区加一个 Header 和一个 16 位 reserved_buf。64 位平台 sizeof(RawData) == 64。
三种内存所有权模式
| 模式 | 创建方式 | is_owner() | 析构时行为 |
| 拥有 | create(size) | true | 释放 data_ |
| 借用外部指针 | shallow_copy(ptr, size) | false | 不释放 |
| 反序列化借用 | operator<<(bytes) | false | 不释放 |
线缆格式
[ magic_begin (4) | RawData 结构体 (64) | payload (N) | magic_end (4) ]
魔数 0x98B7F11A / 0x98B7F11F。check_valid(bytes) 用于接收端验证。
核心方法
| 方法 | 说明 |
| create(size) | 分配 size 字节的拥有缓冲区 |
| shallow_copy(ptr, size) | 借用外部指针,不复制 |
| shallow_copy(other) | 借用另一个 RawData 的缓冲区 |
| deep_copy(ptr, size) | 深拷贝:分配并复制数据 |
| deep_copy(other) | 深拷贝另一个 RawData |
| move_copy(other) | 转移所有权,other 变为空 |
| fill_data(ptr, size) | deep_copy(ptr, size) 的别名 |
| operator>>(bytes) | 序列化为 Bytes(含魔数+结构体+payload) |
| operator<<(bytes) | 零拷贝反序列化(data 指针指向 bytes 内部) |
| check_valid(bytes) | 静态方法:验证 Bytes 是否为有效 RawData 格式 |
| get_serialized_size() | 返回序列化后的总字节数 |
| is_valid() | data 非空且 size > 0 时返回 true |
| is_owner() | 是否拥有当前缓冲区 |
| data() | 返回 payload 的只读指针 |
| size() | 返回 payload 字节数 |
| reserved_buf() | 返回用户可用的 16 位预留字段引用 |
| clear() | 释放拥有的缓冲区,归零所有字段 |
使用示例
vlink::zerocopy::RawData rd;
rd.header.seq = 1;
rd.header.time_pub = vlink::MessageLoop::get_current_nano_time();
rd.create(1024);
std::memcpy(const_cast<uint8_t*>(rd.data()), source_buffer, 1024);
rd >> wire;
vlink::zerocopy::RawData rd2;
if (rd2 << wire) {
process(rd2.data(), rd2.size());
}
uint8_t extern_buf[512];
vlink::zerocopy::RawData rd3;
rd3.header.seq = 2;
Versatile byte buffer with small-buffer optimisation, ownership semantics and compression.
Versatile 128-byte byte buffer with SBO, five ownership modes and compression helpers.
Definition bytes.h:113
static Bytes shallow_copy(uint8_t *data, size_t size) noexcept
Creates a non-owning Bytes alias pointing to an external mutable buffer.
Generic zero-copy raw-byte data container for VLink transport.
CameraFrame 类
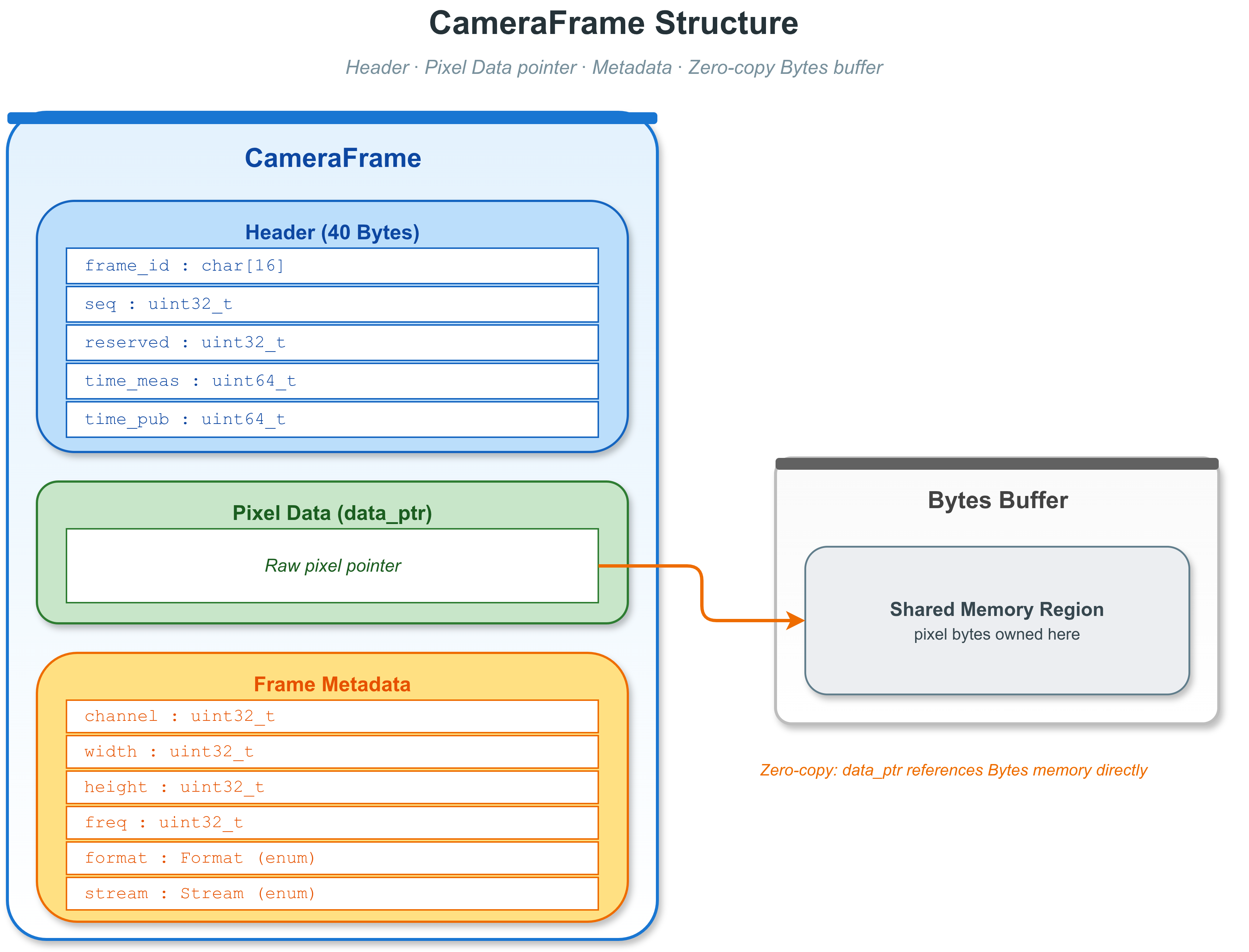
CameraFrame 数据结构
头文件:include/vlink/zerocopy/camera_frame.h
CameraFrame 为图像帧传输设计,携带分辨率、格式、通道号、采集频率等元数据, 以及像素数据缓冲区。64 位平台 sizeof(CameraFrame) == 80。所有权规则与 RawData 相同。
支持的像素格式
| 枚举值 | 数值 | 说明 |
| kFormatUnknown | 0 | 未知格式 |
| kFormatYuv420 | 1 | 平面 YUV 4:2:0(I420) |
| kFormatYuv422 | 2 | 平面 YUV 4:2:2 |
| kFormatYuv444 | 3 | 平面 YUV 4:4:4 |
| kFormatNv12 | 4 | 半平面 YUV 4:2:0(Y + UV 交错) |
| kFormatNv21 | 5 | 半平面 YUV 4:2:0(Y + VU 交错) |
| kFormatYuyv | 6 | 紧凑 YUYV 4:2:2 |
| kFormatYvyu | 7 | 紧凑 YVYU 4:2:2 |
| kFormatUyvy | 8 | 紧凑 UYVY 4:2:2 |
| kFormatVyuy | 9 | 紧凑 VYUY 4:2:2 |
| kFormatBgr888Packed | 10 | 紧凑 24 位 BGR(3 字节/像素) |
| kFormatRgb888Packed | 11 | 紧凑 24 位 RGB(3 字节/像素) |
| kFormatRgb888Planar | 12 | 平面 24 位 RGB(独立 R、G、B 平面) |
| kFormatJpeg | 101 | JPEG 压缩 |
| kFormatH264 | 102 | H.264 / AVC 压缩视频帧 |
| kFormatH265 | 103 | H.265 / HEVC 压缩视频帧 |
视频流帧类型
| 枚举值 | 说明 |
| kStreamUnknown | 未知帧类型 |
| kStreamI | I 帧(关键帧,自包含) |
| kStreamP | P 帧(参考前帧的预测帧) |
| kStreamB | B 帧(双向预测帧) |
核心方法
| 方法/字段 | 说明 |
| header | Header 结构体,包含序列号和时间戳 |
| set_channel(ch) / channel() | 相机通道(传感器索引) |
| set_width(w) / width() | 图像宽度(像素) |
| set_height(h) / height() | 图像高度(像素) |
| set_freq(f) / freq() | 采集频率(Hz) |
| set_format(f) / format() | 像素/编码格式 |
| set_stream(s) / stream() | 视频流帧类型(仅 H264/H265 有效) |
| create(size) | 分配 size 字节的像素缓冲区 |
| shallow_copy(ptr, size) | 借用外部像素指针 |
| deep_copy(ptr, size) | 深拷贝像素数据 |
| fill_data(ptr, size) | deep_copy(ptr, size) 的别名 |
| shallow_copy(other) | 借用另一帧的缓冲区 |
| deep_copy(other) | 深拷贝另一帧 |
| move_copy(other) | 转移所有权 |
| operator>>(bytes) | 序列化为 Bytes |
| operator<<(bytes) | 零拷贝反序列化 |
| check_valid(bytes) | 验证 Bytes 是否为有效 CameraFrame |
| get_serialized_size() | 返回序列化后总字节数 |
| is_valid() | data 非空且 size > 0 |
| is_owner() | 是否拥有像素缓冲区 |
| data() | 只读像素数据指针 |
| size() | 像素数据字节数 |
| clear() | 释放缓冲区,归零所有字段 |
各格式像素大小计算
size_t nv12_size = width * height * 3 / 2;
size_t rgb_size = width * height * 3;
线缆格式(Wire Format)
[ magic_begin (4) | CameraFrame 结构体 (80) | 像素数据 (N) | magic_end (4) ]
PointCloud 类
头文件:include/vlink/zerocopy/point_cloud.h
PointCloud 带 schema 描述的点云容器。Schema 用两个 uint64_t (size_num、type_num)以 nibble(4 位)方式紧凑编码每个字段的字节大小和类型, 再加一段逗号分隔的字段名(最长 160 字节,字段数 3~16)。 64 位平台 sizeof(PointCloud) == 256。
支持的字段类型
| 枚举值 | C++ 类型 | 字节数 |
| kUnknownType | — | — |
| kBoolType | bool | 1 |
| kInt8Type | int8_t | 1 |
| kUint8Type | uint8_t | 1 |
| kInt16Type | int16_t | 2 |
| kUint16Type | uint16_t | 2 |
| kInt32Type | int32_t | 4 |
| kUint32Type | uint32_t | 4 |
| kInt64Type | int64_t | 8 |
| kUint64Type | uint64_t | 8 |
| kFloatType | float | 4 |
| kDoubleType | double | 8 |
Schema 编码原理
size_num 的每个 nibble(4 位)编码一个字段的字节大小:
0x04 = 4 字节(float/int32),0x08 = 8 字节(double/int64),等等
type_num 的每个 nibble 编码 Type 枚举值:
0x0A = kFloatType(10),0x0B = kDoubleType(11),等等
名称字段存储逗号分隔字符串:"x,y,z,intensity"
Key 和 KeyMap
std::string name;
uint8_t type{kUnknownType};
uint8_t size{0};
};
using KeyMap = std::unordered_map<std::string, uint16_t>;
using KeyList = std::vector<Key>;
Definition point_cloud.h:121
辅助向量类型
float x{0};
float y{0};
float z{0};
};
double x{0};
double y{0};
double z{0};
};
PointCloud 同时提供 float 和 double 版本的辅助方法(create_v3f / create_v3d、push_value_v3f / push_value_v3d、get_value_v3f / get_value_v3d),根据精度需求选择。
核心方法
| 方法 | 说明 |
| header | Header 结构体 |
| create<T...>(size, names) | 模板创建,自动推导 Schema(3~16 类型参数) |
| create_v3f<ExtraT...>(size, names) | 创建 XYZ float + 可选附加字段的点云 |
| create_v3d<ExtraT...>(size, names) | 创建 XYZ double + 可选附加字段的点云 |
| resize(size) | 重置点数(清空数据,保留 Schema) |
| push_value_v3f(x, y, z, extras...) | 追加一个 v3f 格式的点 |
| push_value_v3d(x, y, z, extras...) | 追加一个 v3d 格式的点 |
| set_value(index, T... args) | 按顺序写入第 index 个点的所有字段(变参模板) |
| get_value<T>(index, key_map, name) | 按字段名读取第 index 个点的某字段 |
| get_value_v3f(index) | 读取第 index 个点的 XYZ 坐标(返回 Vector3f) |
| get_value_v3d(index) | 读取第 index 个点的 XYZ 坐标(返回 Vector3d) |
| get_key_map(key_list*=nullptr) | 返回 名称->字节偏移 的映射 |
| size() | 返回当前点数 |
| pack_size() | 返回单点字节大小 |
| get_internal_data() | 只读点数据指针(const uint8_t*) |
| get_serialized_size() | 序列化总字节数(magic + 结构体 + 数据 + magic) |
| is_owner() | 是否拥有数据缓冲区 |
| is_valid() | 数据非空且 Schema 有效 |
| operator>>(bytes) | 序列化为 Bytes |
| operator<<(bytes) | 零拷贝反序列化 |
| check_valid(bytes) | 验证 Bytes 格式 |
| shallow_copy(other) / deep_copy(other) | 借用/深拷贝 |
| move_copy(other) | 转移所有权 |
| clear() | 释放并归零 |
线缆格式(Wire Format)
[ magic_begin (4) | PointCloud 结构体 (256) | 点数据 (size * pack_size) | magic_end (4) ]
ProxyData 类
头文件:include/vlink/zerocopy/proxy_data.h
ProxyData 是 VLink 代理层内部使用的路由信封,将序列化的消息负载与路由上下文 (URL、序列化类型、schema family、源主机名)和控制字段(控制 ID、模式、时间戳、序列号)打包 为单次内存分配。在 64 位平台上结构体固定为 **80 字节**。
内部布局
[尾部缓冲区] = [ raw 数据 | url 字符串 | ser_type 字符串 | hostname 字符串 ]
每个区域的位置和长度以 uint32_t 字段存储在结构体内,反序列化后通过 std::string_view 零拷贝访问,不额外分配。
核心方法
| 方法 | 说明 |
| create(raw, url, ser, schema, hostname) | 一次性打包 payload 与全部路由字段 |
| control_id() / set_control_id(id) | 代理控制标识符 |
| mode() / set_mode(mode) | 代理操作模式 |
| timestamp() / set_timestamp(ts) | 消息时间戳(微秒) |
| seq() / set_seq(seq) | 消息序列号 |
| schema() / set_schema(schema) | 粗粒度 schema family |
| raw() | 原始消息负载(浅拷贝 Bytes) |
| url() | topic URL(string_view) |
| ser() | 序列化类型(string_view) |
| hostname() | 源主机名(string_view) |
| operator>>(bytes) / operator<<(bytes) | 序列化/零拷贝反序列化 |
| check_valid(bytes) | 格式验证 |
| is_valid() | 内部区域一致性检查 |
注意:ProxyData 主要供 VLink 内部代理层使用,普通应用开发一般不需要直接操作此类。
与普通 Bytes 传输的区别
数据流对比
CameraFrame 传输(shm 后端 + loan):
像素数据 -> loan 缓冲区(共享内存)-> publish 指针 -> 订阅端回调直接访问
-> 回调返回时自动 unloan
CameraFrame 传输(dds 后端):
像素数据 -> operator>> 序列化写入网络缓冲区 -> 网络 ->
operator<< 借用 Bytes 内部指针 -> 用户回调
关键区别汇总
| 比较维度 | Bytes 传输 | CameraFrame / PointCloud |
| 元数据 | 无 | 宽/高/格式/时间戳/序列号等 |
| 反序列化内存拷贝 | 有(Bytes 深拷贝) | 无(借用指针) |
| shm 零拷贝支持 | 是 | 是 |
| 格式验证 | 无 | 魔数校验 |
| 跨语言互操作 | 需协议约定 | 内置 Schema(PointCloud) |
| 适用场景 | 通用,小消息 | 传感器大负载数据 |
shm/shm2 后端的 loan 机制
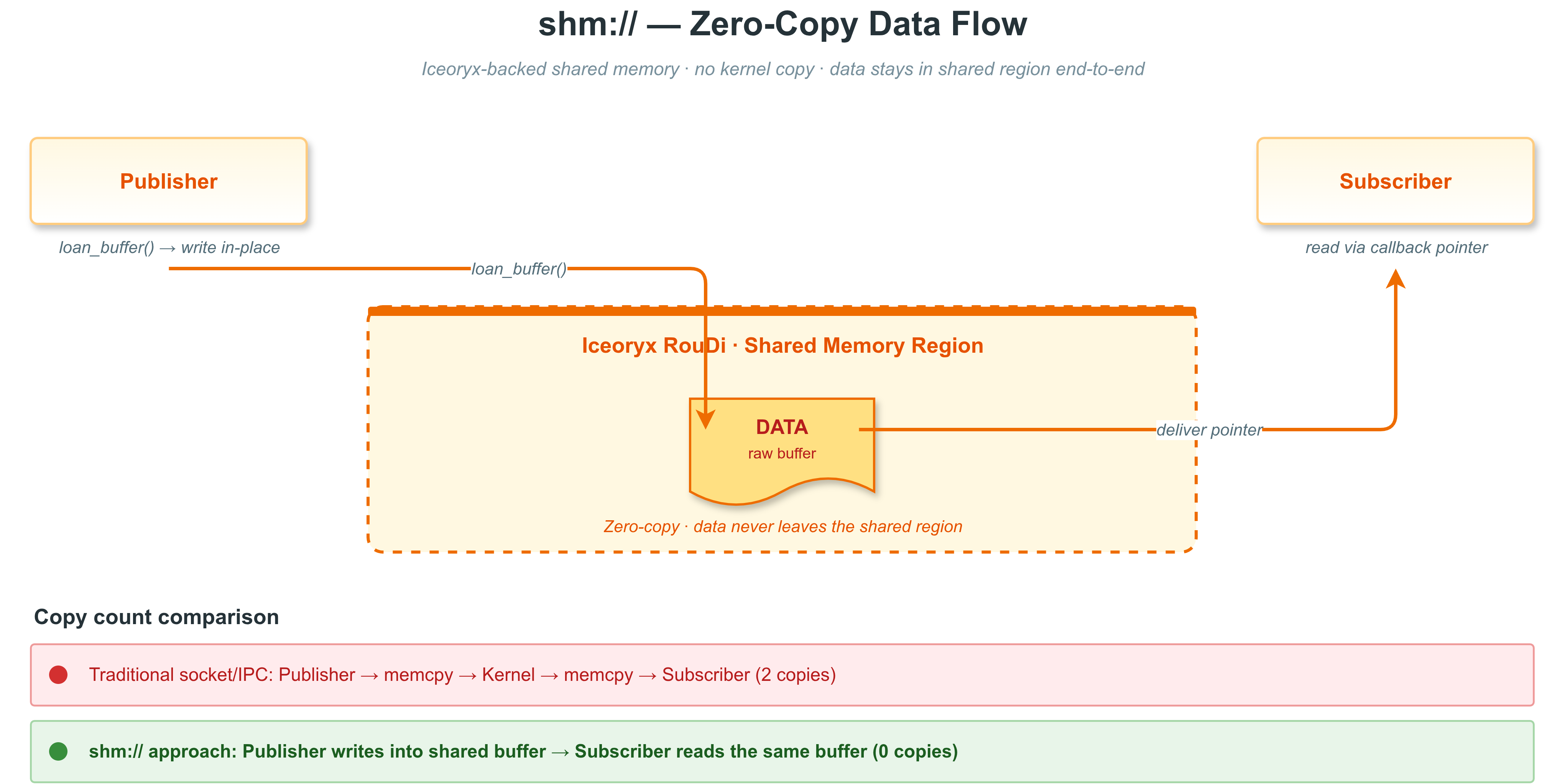
SHM 零拷贝流程
loan 的前置条件
Node::is_support_loan() 在 shm://(Iceoryx)和 shm2://(Iceoryx2)下无条件返回 true; zenoh:// 仅当 SHM 显式启用(?shm=1 / zenoh.shm=1 / VLINK_ZENOH_SHM=1)、 构建带 Z_FEATURE_SHARED_MEMORY + Z_FEATURE_UNSTABLE_API、且 SHM provider 已就绪时返回 true, 此时 loan(size) 在 size >= zenoh.shm_loan_threshold(默认 8K)时走 Zenoh SHM, 否则回退到普通堆 Bytes::create(size)(仍可正常 publish,只是不享受零拷贝)。 其他后端(intra、dds、ddsc、ddsr、ddst、someip、fdbus、qnx、mqtt)的 is_support_loan() 始终返回 false,此时 loan() 返回空 Bytes。
发布端使用 loan
pub.wait_for_subscribers();
if (pub.is_support_loan()) {
camera_driver_fill(buf.
data(), buf.
size());
pub.publish(buf);
}
}
bool empty() const noexcept
Returns true if the buffer is empty (no data pointer and size == 0).
Definition bytes.h:880
size_t size() const noexcept
Returns the number of usable bytes (excluding the prefix offset region).
Definition bytes.h:868
uint8_t * data() noexcept
Returns a pointer to the start of the user data region (after the prefix offset).
Definition bytes.h:860
Type-safe publisher for the VLink event communication model.
Definition publisher.h:102
若 publish() 未被调用,调用方必须显式 pub.return_loan(buf),否则共享内存池会 耗尽。
手动 unloan(接收端)
默认情况下 Subscriber 回调返回后自动归还 loan。若要在回调外继续持有数据指针, 启用手动 unloan 模式:
sub.set_manual_unloan(true);
process(msg);
sub.return_loan(msg);
});
Type-safe subscriber for the VLink event communication model.
Definition subscriber.h:110
内存所有权与生命周期管理
所有权规则
所有 zerocopy 容器遵循统一所有权模型,通过 is_owner() 区分:
| 创建方式 | is_owner() | 析构时行为 |
| create(size) | true | 释放 data_ |
| shallow_copy(ptr,size) | false | 不释放 |
| shallow_copy(other) | false | 不释放 |
| deep_copy(...) | true | 释放 data_ |
| move_copy(other) | 继承 other | 取决于 other |
| operator<<(bytes) | false | 不释放 |
shallow_copy(const T&) 返回 false 仅当 this == &target(自拷贝)。 shallow_copy(uint8_t*, size_t) 返回 false 当 data == nullptr、 size == 0 或新指针与当前 data_ 完全相同。
生命周期注意事项
规则 1:借用模式下,源对象必须比容器生命周期更长
{
vlink::zerocopy::RawData rd;
rd >> bytes;
vlink::zerocopy::RawData rd2;
rd2 << bytes;
}
vlink::zerocopy::RawData rd2;
rd2 << bytes;
process(rd2);
规则 2:移动后源对象不可使用
vlink::zerocopy::CameraFrame src;
src.create(1920 * 1080 * 3 / 2);
vlink::zerocopy::CameraFrame dst;
dst.move_copy(src);
assert(!src.is_valid());
assert(dst.is_valid());
规则 3:浅拷贝(shallow_copy)会复制 Header
shallow_copy(other) 只借用数据指针(不拷贝实际数据),**但会复制 Header 字段**(序列号、时间戳等元数据)。 数据指针指向源对象的缓冲区,因此源对象必须比浅拷贝对象存活更久。 若需要独立的数据缓冲区和 Header,使用 deep_copy() 后再修改。
规则 4:回调内不要保存对 loan 缓冲区的引用
const uint8_t* dangerous_ptr = nullptr;
dangerous_ptr = msg.
data();
return;
});
完整使用示例
示例 1:相机帧传输(shm 后端零拷贝)
#include <iostream>
#include <thread>
#include <chrono>
#include <cstring>
using namespace std::chrono_literals;
void camera_publisher_thread() {
pub.wait_for_subscribers();
uint32_t seq = 0;
const uint32_t W = 1920;
const uint32_t H = 1080;
const size_t frame_size = W * H * 3 / 2;
while (true) {
vlink::zerocopy::CameraFrame frame;
frame.header.seq = seq++;
frame.header.time_meas = vlink::MessageLoop::get_current_nano_time();
frame.header.time_pub = vlink::MessageLoop::get_current_nano_time();
frame.set_channel(0);
frame.set_width(W);
frame.set_height(H);
frame.set_freq(30);
frame.set_format(vlink::zerocopy::CameraFrame::kFormatNv12);
frame.create(frame_size);
std::memset(const_cast<uint8_t*>(frame.data()), seq % 256, frame_size);
pub.publish(frame);
std::this_thread::sleep_for(33ms);
}
}
void camera_subscriber_thread() {
sub.listen([](const vlink::zerocopy::CameraFrame& frame) {
if (!frame.is_valid()) {
return;
}
std::cout << "Frame seq=" << frame.header.seq
<< " size=" << frame.width() << "x" << frame.height()
<< " format=" << static_cast<int>(frame.format())
<< " data_size=" << frame.size() << " bytes"
<< std::endl;
const uint8_t* y_plane = frame.data();
const uint8_t* uv_plane = frame.data() + frame.width() * frame.height();
});
std::this_thread::sleep_for(5s);
}
int main() {
std::thread pub_thread(camera_publisher_thread);
std::thread sub_thread(camera_subscriber_thread);
pub_thread.join();
sub_thread.join();
return 0;
}
Zero-copy camera image frame container for VLink transport.
Type-safe event-model publisher for VLink topics.
Pre-defined QoS profiles for common VLink communication patterns.
Type-safe event-model subscriber for VLink topics.
示例 2:点云传输(float XYZ + intensity)
#include <iostream>
#include <random>
void lidar_publisher() {
pub.wait_for_subscribers();
std::mt19937 rng(42);
std::uniform_real_distribution<float> dist(-50.0f, 50.0f);
uint32_t seq = 0;
while (true) {
const int point_count = 100000;
vlink::zerocopy::PointCloud pc;
pc.header.seq = seq++;
pc.header.time_pub = vlink::MessageLoop::get_current_nano_time();
pc.create_v3f<float>(point_count, {"intensity"});
for (int i = 0; i < point_count; ++i) {
float x = dist(rng);
float y = dist(rng);
float z = dist(rng) / 10.0f;
float intensity = (std::abs(z) + 1.0f);
pc.push_value_v3f(x, y, z, intensity);
}
std::cout << "Publishing " << pc.size() << " points, "
<< pc.size() * pc.pack_size() << " bytes" << std::endl;
pub.publish(pc);
std::this_thread::sleep_for(std::chrono::milliseconds(100));
}
}
void lidar_subscriber() {
sub.listen([](const vlink::zerocopy::PointCloud& pc) {
if (!pc.is_valid()) {
return;
}
std::cout << "Received seq=" << pc.header.seq
<< " points=" << pc.size()
<< " pack_size=" << pc.pack_size() << " bytes/point"
<< std::endl;
auto key_map = pc.get_key_map();
for (size_t i = 0; i < std::min<size_t>(5, pc.size()); ++i) {
auto xyz = pc.get_value_v3f(i);
float intensity = pc.get_value<float>(i, key_map, "intensity");
std::cout << " point[" << i << "]: "
<< "x=" << xyz.x
<< " y=" << xyz.y
<< " z=" << xyz.z
<< " intensity=" << intensity
<< std::endl;
}
});
std::this_thread::sleep_for(std::chrono::seconds(10));
}
Zero-copy, schema-aware 3-D point cloud container for VLink transport.
示例 3:RawData 跨进程传输
int main_publisher() {
pub.wait_for_subscribers();
struct MyProtocol {
uint32_t cmd;
uint32_t flags;
float payload[256];
};
vlink::zerocopy::RawData rd;
rd.header.seq = 1;
rd.header.time_pub = vlink::MessageLoop::get_current_nano_time();
rd.create(sizeof(MyProtocol));
auto* proto = reinterpret_cast<MyProtocol*>(const_cast<uint8_t*>(rd.data()));
proto->cmd = 0x1001;
proto->flags = 0x0001;
proto->payload[0] = 3.14f;
pub.publish(rd);
return 0;
}
int main_subscriber() {
sub.listen([](const vlink::zerocopy::RawData& rd) {
if (!rd.is_valid()) {
return;
}
struct MyProtocol {
uint32_t cmd;
uint32_t flags;
float payload[256];
};
if (rd.size() < sizeof(MyProtocol)) {
return;
}
const auto* proto = reinterpret_cast<const MyProtocol*>(rd.data());
std::cout << "cmd=0x" << std::hex << proto->cmd
<< " payload[0]=" << proto->payload[0] << std::endl;
});
std::this_thread::sleep_for(std::chrono::seconds(5));
return 0;
}
示例 4:序列化与反序列化(网络传输场景)
int main() {
vlink::zerocopy::CameraFrame tx_frame;
tx_frame.set_width(640);
tx_frame.set_height(480);
tx_frame.set_format(vlink::zerocopy::CameraFrame::kFormatRgb888Packed);
tx_frame.create(640 * 480 * 3);
std::memset(const_cast<uint8_t*>(tx_frame.data()), 0xFF, tx_frame.size());
tx_frame >> wire;
std::cout <<
"Serialized size: " << wire.
size() <<
" bytes" << std::endl;
if (vlink::zerocopy::CameraFrame::check_valid(wire)) {
vlink::zerocopy::CameraFrame rx_frame;
if (rx_frame << wire) {
std::cout << "Received: " << rx_frame.width() << "x" << rx_frame.height()
<< " format=" << static_cast<int>(rx_frame.format())
<< " is_owner=" << rx_frame.is_owner()
<< std::endl;
process_frame(rx_frame);
}
}
return 0;
}
示例 5:H.264 视频流传输
void h264_publisher(const uint8_t* nal_data, size_t nal_size, bool is_keyframe) {
static bool initialized = false;
if (!initialized) {
pub.wait_for_subscribers();
initialized = true;
}
vlink::zerocopy::CameraFrame frame;
frame.header.time_pub = vlink::MessageLoop::get_current_nano_time();
frame.set_width(1920);
frame.set_height(1080);
frame.set_format(vlink::zerocopy::CameraFrame::kFormatH264);
frame.set_stream(is_keyframe
? vlink::zerocopy::CameraFrame::kStreamI
: vlink::zerocopy::CameraFrame::kStreamP);
frame.shallow_copy(const_cast<uint8_t*>(nal_data), nal_size);
pub.publish(frame);
}
void setup_h264_subscriber() {
sub.listen([](const vlink::zerocopy::CameraFrame& frame) {
if (frame.format() != vlink::zerocopy::CameraFrame::kFormatH264) {
return;
}
bool is_keyframe = (frame.stream() == vlink::zerocopy::CameraFrame::kStreamI);
decode_h264_nal(frame.data(), frame.size(), is_keyframe);
});
}