目录
- 7.1 URL 格式规范
- 7.2 传输后端选择指南
- 7.3 后端能力对比表
- 7.4 各后端详细说明
- intra:// — 进程内通信
- shm:// — Iceoryx 共享内存
- shm2:// — Iceoryx2 共享内存
- dds:// — Fast-DDS RTPS
- ddsc:// — CycloneDDS
- ddsr:// — RTI DDS
- ddst:// — TravoDDS
- zenoh:// — Zenoh 协议
- someip:// — SOME/IP 车载以太网
- mqtt:// — MQTT 物联网协议
- fdbus:// — FDBus IPC
- qnx:// — QNX 实时 IPC
- 7.5 后端混合使用与 Bridge
- 7.6 全局初始化与生命周期管理
- 7.7 URL 重映射
7.1 URL 格式规范
VLink 的核心设计哲学是 **URL 即传输**:通过 URL 前缀选择传输后端,通过查询参数配置传输行为,业务代码无需感知底层协议细节。
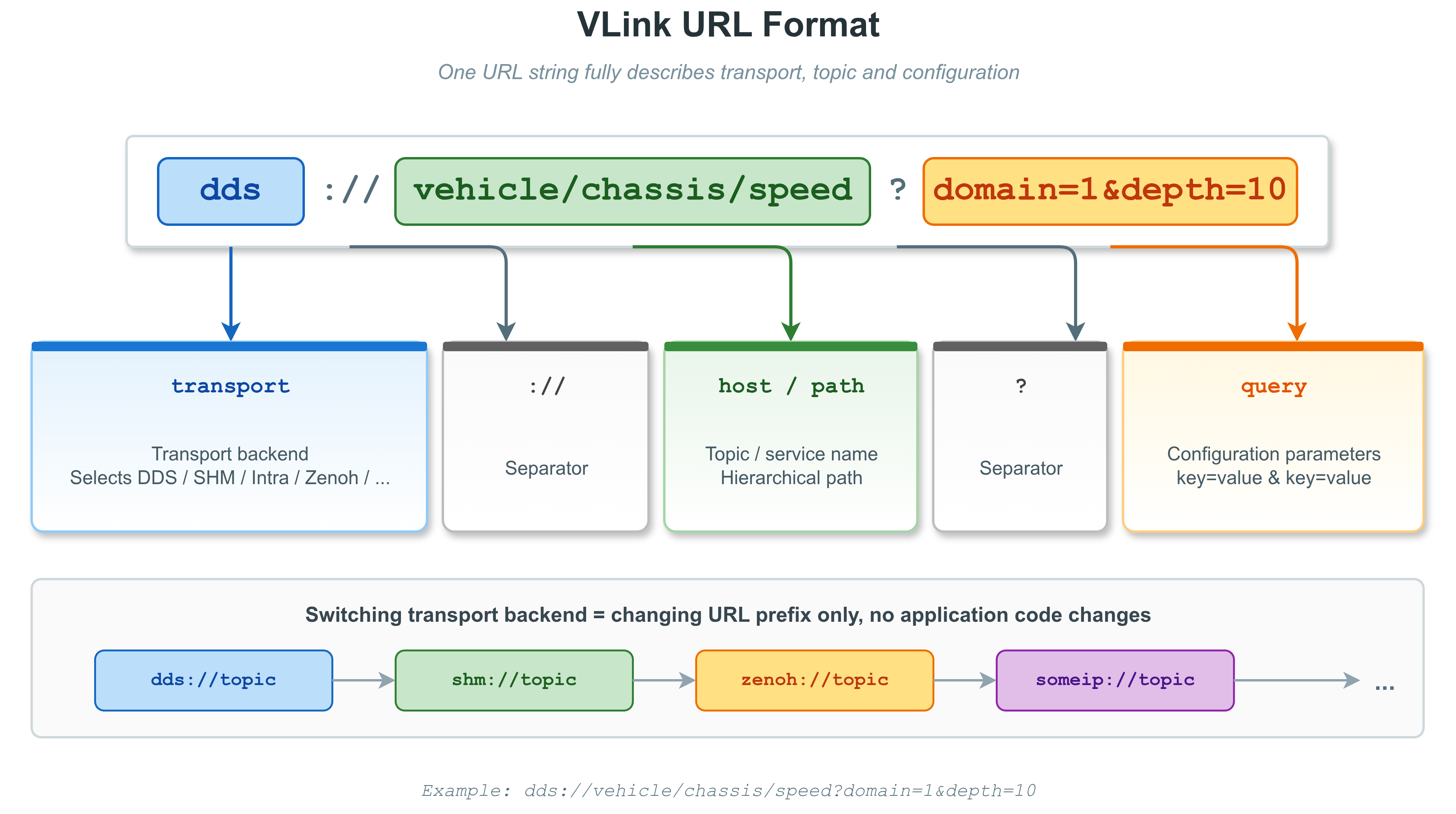
URL 格式
<transport>://[<host>[:<port>]]/<path>[?<query>][#<fragment>]
|---------| |-------------| |----| |------| |--------|
传输后端 主机与端口(可选) 路径 配置参数 传输提示
各组成部分说明:
| 部分 | 说明 | 示例 |
| transport | 传输后端标识 | dds、shm、intra、zenoh |
| host | 主机名或地址(可选,含可选端口号) | 127.0.0.1:30490、vehicle |
| path | 主题路径 | /chassis/speed |
| query | 配置参数,& 分隔 | domain=1&depth=10&qos=sensor |
| fragment | 传输提示(部分后端使用) | #queue、#1M |
支持的 transport 列表:
| Transport | 底层技术 | 通信范围 |
| intra:// | 内置消息队列 | 进程内 |
| shm:// | Iceoryx RouDi | 同机跨进程 |
| shm2:// | Iceoryx2 | 同机跨进程 |
| dds:// | Fast-DDS RTPS | 跨机器 |
| ddsc:// | CycloneDDS | 跨机器 |
| ddsr:// | RTI Connext DDS | 跨机器 |
| ddst:// | TravoDDS(国产 DDS) | 跨机 |
| zenoh:// | Zenoh 协议 | 跨机/云边 |
| someip:// | SOME/IP | 车载以太网 |
| mqtt:// | MQTT | 跨机/物联网 |
| fdbus:// | FDBus IPC | 同机 |
| qnx:// | QNX IPC | 同机(QNX) |
**源码可识别 ≠ 默认构建启用**:上表中的 scheme 都能被 Url 解析,但对应模块是否参与当前构建取决于 CMake 配置阶段依赖探测。各 module 的 CMakeLists.txt 提供 SKIP_<NAME> 选项和依赖 find_package(),依赖缺失时该模块被跳过。特别地:
- shm2:检测到 ANDROID 即跳过。
- ddsr / ddst / fdbus / qnx:SKIP_DDSR / SKIP_DDST / SKIP_FDBUS / SKIP_QNX 默认 ON,需要对应专有 SDK 或系统服务时再显式打开。
- intra / shm / shm2 / dds / ddsc / zenoh / someip / mqtt 的 SKIP_* 默认 OFF,依赖缺失时跳过。
**Conan 组件**:conanfile.py 当前只导出 vlink、dds、ddsc、shm、intra、c_api、proxy_api、proxy_server、all(all = vlink+dds+ddsc+shm+intra)。shm2 / zenoh / ddsr / ddst / someip / fdbus / mqtt / qnx **不在 Conan 组件导出范围**,需自行构建。
切换传输 = 只改前缀:
Publisher<Imu> pub("dds://sensor/imu");
Publisher<Imu> pub("shm://sensor/imu");
Publisher<Imu> pub("intra://sensor/imu");
Publisher<Imu> pub("zenoh://sensor/imu");
7.2 传输后端选择指南
根据部署场景选择合适的传输后端。建议优先使用**稳定后端**(intra、shm、dds、ddsc):
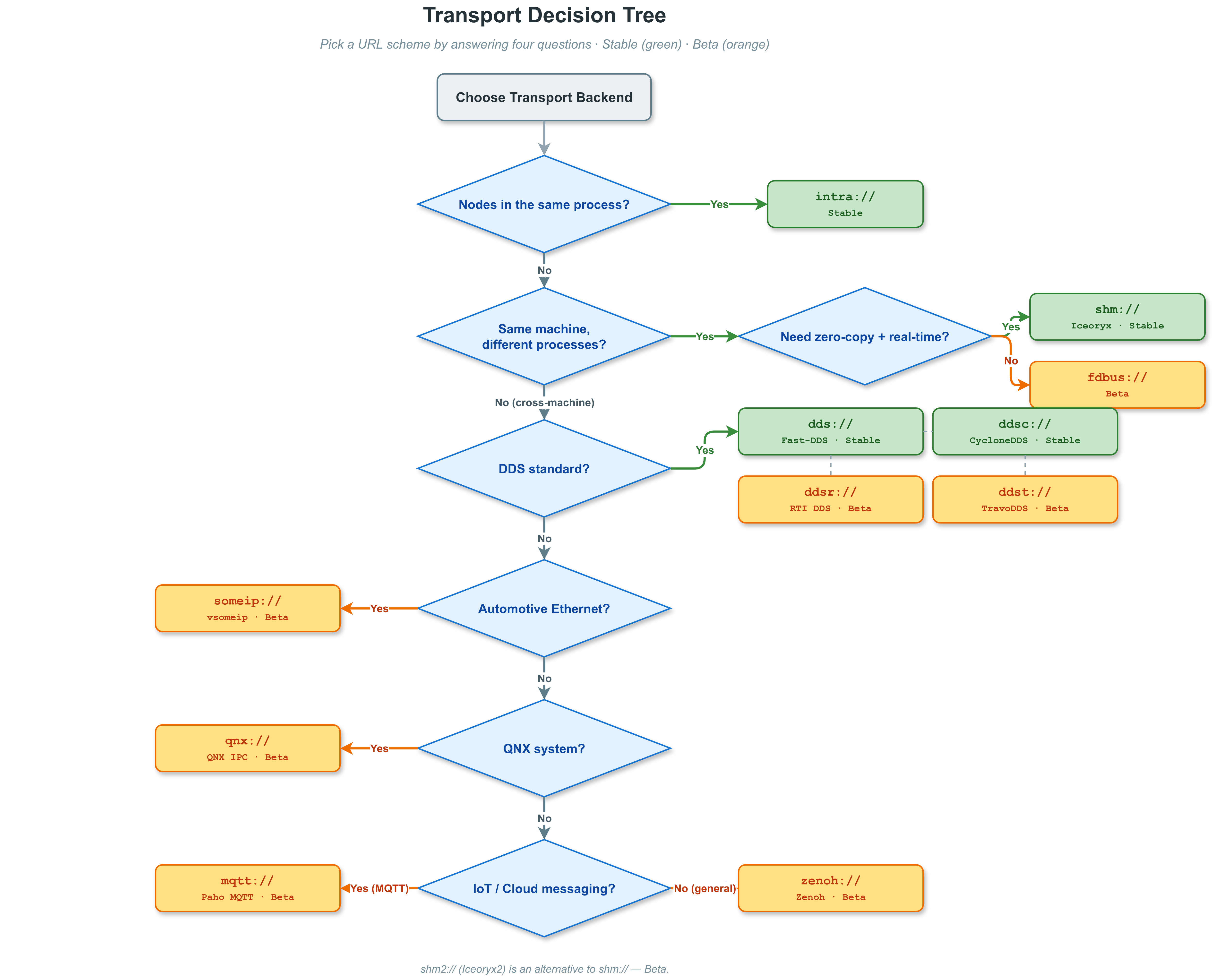
传输后端决策树
快速决策表:
| 场景 | 推荐后端 | 状态 |
| 同进程模块间通信(最低延迟) | intra:// | 稳定 |
| 同机高性能零拷贝(如相机/点云) | shm:// | 稳定 |
| 局域网跨机器(DDS 生态) | dds:// / ddsc:// | 稳定 |
| 同机零拷贝(Iceoryx2 新方案) | shm2:// | Beta |
| 云边协同、跨 NAT、物联网 | zenoh:// | Beta |
| 车载以太网 AUTOSAR 场景 | someip:// | Beta |
| 物联网、轻量跨机器通信 | mqtt:// | Beta |
| 同机标准 IPC(非零拷贝) | fdbus:// | Beta |
| QNX 实时操作系统 | qnx:// | Beta |
| 开发/测试阶段(切换零成本) | 任意,URL 前缀替换 | |
7.3 后端能力对比表
稳定后端:
| 后端 | 通信范围 | 零拷贝 | 依赖库 | 字段模型 | QoS 支持 | 消息级加密 | 状态 |
| intra:// | 进程内 | 是 | 无 | 是 | 否 | 不支持 | 稳定 |
| shm:// | 同机跨进程 | 是 | iceoryx + RouDi | 是 | 部分 | 支持 | 稳定 |
| dds:// | 跨机器/局域网 | 否 | Fast-DDS | 是 | 完整 | 非 CDR 类型支持 | 稳定 |
| ddsc:// | 跨机器/局域网 | 否 | CycloneDDS | 是 | 完整 | 支持 | 稳定 |
Beta 后端:
| 后端 | 通信范围 | 零拷贝 | 依赖库 | 字段模型 | QoS 支持 | 消息级加密 | 状态 |
| shm2:// | 同机跨进程 | 是 | iceoryx2-c | 是 | 部分 | 支持 | Beta |
| ddsr:// | 跨机器/局域网 | 否 | RTI Connext DDS | 是 | 完整 | 支持 | Beta |
| ddst:// | 跨机 | 否 | TravoDDS(国产 DDS) | 是 | 完整 | 支持 | Beta |
| zenoh:// | 跨机/云边 | 否 | zenoh-c/zenoh-pico | 是 | 部分 | 支持 | Beta |
| someip:// | 车载以太网 | 否 | vsomeip | 是 | SOME/IP | 支持 | Beta |
| mqtt:// | 跨机/物联网 | 否 | Paho MQTT C | 是 | 部分 | 支持 | Beta |
| fdbus:// | 同机 | 否 | fdbus | 是 | 否 | 支持 | Beta |
| qnx:// | 同机(QNX) | 否 | QNX SDK | 是 | 否 | 支持 | Beta |
消息级加密说明:intra:// 不经过序列化管道,dds:// 与 CDR 类型组合绕过 VLink Bytes 路径,这两种组合调用 set_security_key() / set_security_callbacks() 只会打 fatal log 不会生效。详见 09-security.md。
通信模型支持矩阵:
| 后端 | Publisher | Subscriber | Server | Client | Setter | Getter |
| intra:// | YES | YES | YES | YES | YES | YES |
| shm:// | YES | YES | YES | YES | YES | YES |
| shm2:// | YES | YES | YES | YES | YES | YES |
| dds:// | YES | YES | YES | YES | YES | YES |
| ddsc:// | YES | YES | YES | YES | YES | YES |
| ddsr:// | YES | YES | YES | YES | YES | YES |
| ddst:// | YES | YES | YES | YES | YES | YES |
| zenoh:// | YES | YES | YES | YES | YES | YES |
| someip:// | YES | YES | YES | YES | YES | YES |
| mqtt:// | YES | YES | YES | YES | YES | YES |
| fdbus:// | YES | YES | YES | YES | YES | YES |
| qnx:// | YES | YES | YES | YES | YES | YES |
7.4 各后端详细说明
intra:// — 进程内通信
定位: 同一 OS 进程内各模块间通信,极低延迟,无序列化,无内核调用。
特点:
- 消息对象直接通过回调函数传递,无序列化/反序列化开销。
- 支持队列模式(queue,默认)和直接模式(direct)。
- 支持全部六种节点类型(Publisher/Subscriber、Server/Client、Setter/Getter)。
- 无需任何外部依赖或守护进程。
URL 格式:
intra://<address>[?event=<name>&pipeline=<N>][#queue|#direct]
| IntraConf 参数 | 类型 | 必填 | URL 参数 | 说明 |
| address | string | Yes | <host>/<path> | 主题地址,最大 80 字符 |
| event | string | - | ?event= | 可选次级事件过滤名称 |
| pipeline | int32_t | - | ?pipeline= | 队列深度,0 表示无流水线 |
| type | string | - | #queue / #direct | 队列模式(默认 queue) |
URL 示例:
intra://sensor/imu
intra://sensor/imu?event=notify
intra://sensor/imu#direct
依赖安装: 无外部依赖,VLink 内置实现。
CMake 编译选项: 编译时需启用 VLINK_SUPPORT_INTRA(通常默认开启)。
使用示例:
sub.listen([](const int& v) { std::cout << v << std::endl; });
pub.publish(42);
IntraConf conf("sensor/value", "", 4, "queue");
server.listen([](const int& req, int& resp) { resp = req * 2; });
auto result = client.invoke(21);
Type-safe client for the VLink method (RPC) communication model.
Definition client.h:123
Type-safe publisher for the VLink event communication model.
Definition publisher.h:102
Type-safe server for the VLink method (RPC) communication model.
Definition server.h:108
Type-safe subscriber for the VLink event communication model.
Definition subscriber.h:110
Transport configuration for the intra:// in-process messaging backend.
注意事项:
- direct 模式下回调在 publish() 的调用线程中执行,注意避免死锁。
- 字段模型(Setter/Getter)在进程内使用,数据通过 IntraFactory 的内部存储管理。
- 仅限同一进程使用,跨进程无效。
shm:// — Iceoryx 共享内存
定位: 同机不同进程间的零拷贝高性能 IPC,适合高频大数据量(相机帧、点云等)传输。
特点:
- 基于 iceoryx RouDi 守护进程管理共享内存池。
- 真正零拷贝:发布端将数据写入共享内存,订阅端直接读取,无内存拷贝。
- 支持全部六种节点类型(包括 Setter/Getter)。
- 地址和事件字符串不超过 80 字符(Iceoryx 限制)。
URL 格式:
shm://<address>[?event=<name>&domain=<N>&depth=<N>&history=<N>&wait=<0|1>]
| ShmConf 参数 | 类型 | 必填 | URL 参数 | 说明 |
| address | string | Yes | <host>/<path> | 服务/主题名称,最大 80 字符 |
| event | string | - | ?event= | 可选次级事件名称,最大 80 字符 |
| domain | int32_t | - | ?domain= | Iceoryx 域 ID(默认 0) |
| depth | int32_t | - | ?depth= | 历史缓冲深度(默认 0,即无缓冲) |
| history | int32_t | - | ?history= | 历史计数(默认 0 用于 pub/sub,1 用于 setter/getter) |
| wait | int32_t | - | ?wait=0/1 | 启用阻塞等待模式(仅 Publisher/Subscriber 有效) |
URL 示例:
shm://sensor/lidar
shm://sensor/lidar?depth=10
shm://sensor/lidar?domain=1&depth=5&wait=1
**依赖**:Eclipse iceoryx(iceoryx_posh::iceoryx_posh),CMake 配置阶段探测;未安装时该模块被跳过。可通过 Conan、发行版包或源码构建安装。
SHM 守护进程启动(三选一,推荐度从高到低):
# ✅ 方式 1(首选,推荐生产和开发):vlink-proxy -c
# 内嵌 iox-roudi + 通过 -l 选择三档内存策略(默认 -l 2 = Middle,等价 proxy/etc/proxy_roudi.toml):
# -l 1 (Low) 6 档预分配 chunk(轻量端侧,等价 proxy_roudi_small.toml)
# -l 2 (Middle) 7 档预分配 chunk(默认,等价 proxy_roudi.toml)
# -l 3 (High) 8 档预分配 chunk(重载/点云,等价 proxy_roudi_large.toml):
# 1 KB × 10000 / 16 KB × 1000 / 128 KB × 500 / 1 MB × 200 /
# 3 MB × 100 / 6 MB × 50 / 13 MB × 30 / 24 MB × 20
# 小 chunk 多、大 chunk 少,覆盖控制指令→小帧→大帧→点云全量程载荷;
# 同时带远程拓扑监控能力。
vlink-proxy -c # 使用内置默认配置(-l 2 Middle,等价 proxy/etc/proxy_roudi.toml)
vlink-proxy -c -l 3 # 切换到 High 档(点云/重载场景,等价 proxy_roudi_large.toml)
vlink-proxy -c /path/to/roudi.toml # 自定义 iox-roudi 配置
# 方式 2:外部独立起 iox-roudi
# 仅在无法运行 vlink-proxy 时使用;建议直接复制 proxy/etc/proxy_roudi.toml(或 _large/_small)作为起点
iox-roudi -c /etc/iceoryx/roudi_config.toml
# 方式 3:在代码中启动嵌入式 RouDi(仅单进程适用)
vlink::ShmConf::init_roudi();
vlink-proxy 不只是一个 "iox-roudi 启动器":它本身是 VLink 的**监控代理守护进程**(详见 16-proxy.md),提供跨机器拓扑查看、远程数据桥接、DDS/SHM 两种后端直连等能力。-c 只是让它顺带把 iox-roudi 也起起来,一个进程覆盖"SHM 守护 + 远程监控"。
使用示例:
int main() {
ShmConf::init_runtime("my_process");
pub.wait_for_subscribers();
pub.publish(25.6f);
sub.listen([](const float& t) {
std::cout << "Temperature: " << t << std::endl;
});
setter.set(1);
if (auto v = getter.get()) {
std::cout << "Mode: " << *v << std::endl;
}
ShmConf conf("camera/frame", "", 0, 4, 0, 0);
ShmConf::deinit_runtime();
return 0;
}
Type-safe field reader for the VLink field communication model.
Definition getter.h:105
Type-safe field writer for the VLink field communication model.
Definition setter.h:91
Transport configuration for the shm:// Iceoryx shared-memory backend.
注意事项:
- **SHM 守护进程必须在所有使用 shm:// 的业务进程启动前运行**(推荐 vlink-proxy -c)。
- 进程名称在同一 RouDi 域内必须唯一,长度不超过 80 字符。
- wait=1 阻塞等待模式仅对 Publisher/Subscriber 有效,用于 RPC 或字段节点会导致 parse_protocol() 返回 false。
- 地址字符串不能包含特殊字符,Iceoryx 对命名有严格限制。
shm2:// — Iceoryx2 共享内存
定位: Iceoryx2 是 Iceoryx 的下一代实现,**无需独立的 RouDi 守护进程**,API 更现代化。
特点:
- 无需外部守护进程,每个进程自治管理共享内存。
- 支持通过 URL 片段(#size)指定每消息的共享内存分配大小。
- 默认每消息 128 字节(kDefaultMemSize),最大 32MiB(kMaxMemSize)。
- 与 shm:// 不兼容,两者不能互通。
URL 格式:
shm2://<address>[?event=<name>&domain=<N>&depth=<N>&history=<N>&wait=<0|1>][#<size>]
| Shm2Conf 参数 | 类型 | 必填 | URL 参数 | 说明 |
| address | string | Yes | <host>/<path> | 主题地址 |
| event | string | - | ?event= | 事件名称 |
| domain | int32_t | - | ?domain= | 域 ID |
| depth | int32_t | - | ?depth= | 历史队列深度 |
| history | int32_t | - | ?history= | 历史缓存 |
| wait | int32_t | - | ?wait=0/1 | 等待就绪 |
| size | uint64_t | - | #<size> | 缓冲区大小(默认 128B,最大 32MiB) |
**size 单位**:B、K/KB、M/MB、G/GB(不区分大小写),范围 (0, 32MiB]。
片段大小示例:
| 示例 | 含义 |
| shm2://topic | 默认 128 字节 |
| shm2://topic#1K | 1024 字节 |
| shm2://topic#1M | 1 MiB |
| shm2://topic#8M | 8 MiB |
| shm2://topic#1G | 1 GiB(超出上限将报错) |
URL 示例:
shm2://sensor/lidar
shm2://sensor/lidar?depth=10#1M
shm2://sensor/image?depth=5#512K
依赖**:iceoryx2-c(Rust 实现,CMake 中通过 find_package(iceoryx2-c CONFIG) 探测)。Android 平台直接跳过(modules/shm2/CMakeLists.txt 检测到 ANDROID 即 return)。当前 **不在 Conan 组件导出 中,需自行构建。
使用示例:
int main() {
pub.publish(buf);
sub.listen([](
const Bytes& data) {
process_pointcloud(data.
data(), data.
size());
});
speed_setter.set(80.5f);
if (auto v = speed_getter.get()) {
std::cout << "Speed: " << *v << std::endl;
}
Shm2Conf conf("camera/frame", "", 0, 0, 0, 0, 1920 * 1080 * 3);
return 0;
}
Versatile 128-byte byte buffer with SBO, five ownership modes and compression helpers.
Definition bytes.h:113
size_t size() const noexcept
Returns the number of usable bytes (excluding the prefix offset region).
Definition bytes.h:868
uint8_t * data() noexcept
Returns a pointer to the start of the user data region (after the prefix offset).
Definition bytes.h:860
static Bytes create(size_t size, uint8_t offset=0) noexcept
Creates an owned Bytes buffer of the given size.
Transport configuration for the shm2:// Iceoryx2 shared-memory backend.
注意事项:
- shm2:// 与 shm:// 不兼容,不同后端的节点无法互通。
- 消息大小必须在编译/配置时确定(URL 片段),运行时超出分配大小的消息会被截断或拒绝。
- 目前处于 Beta 状态,API 可能随 iceoryx2 版本变动。
dds:// — Fast-DDS RTPS
定位: 基于 eProsima Fast-DDS(Fast-RTPS)的跨机器 DDS 通信,VLink 最主要的跨网络后端。
特点:
- 支持完整 DDS QoS(可靠性、持久性、历史深度、截止期限等)。
- 支持命名 QoS Profile(通过 register_qos() 注册)。
- 支持 CDR 类型的 TypeSupport 注册(register_topic())。
- 支持从 XML 文件加载 QoS Profile(load_global_qos_file())。
- 支持 Topic 发现(get_discovered_topics())。
URL 格式:
dds://<topic>[?domain=<N>&depth=<N>&qos=<name>]
dds://<topic>[?domain=<N>&part=<v>&topic=<v>&pub=<v>&sub=<v>&writer=<v>&reader=<v>]
| DdsConf 参数 | 类型 | 必填 | URL 参数 | 说明 |
| topic | string | Yes | <host>/<path> | DDS Topic 名称 |
| domain | int32_t | - | ?domain= | DDS Domain ID(默认先读取 VLINK_DDS_DOMAIN,未设置时为 0;推荐通过 URL 或显式 DdsConf 指定) |
| depth | int32_t | - | ?depth= | DDS History 深度(默认 0,即传输层默认值) |
| qos | string | - | ?qos= | 通过 register_qos() 注册的命名 QoS Profile |
| qos_ext | PropertiesMap | - | ?part=、?topic=、?pub=、?sub=、?writer=、?reader= | 扩展 QoS 配置(与 ?qos= 互斥) |
qos 和 qos_ext 互斥,不可同时使用。
URL 示例:
dds://vehicle/speed
dds://vehicle/speed?domain=1&depth=10
dds://vehicle/speed?qos=sensor
dds://vehicle/speed?domain=42&reader=my_reader_qos
**依赖**:eProsima Fast-DDS(CMake 中通过 find_package(fastdds CONFIG) 或 find_package(fastrtps CONFIG) 探测),可通过 Conan 或源码构建安装。
使用示例:
int main() {
DdsConf::register_qos("reliable", reliable_qos);
pub.publish("System started");
sub.listen([](const std::string& msg) {
std::cout << msg << std::endl;
});
auto topics = DdsConf::get_discovered_topics(0);
for (const auto& [name, type] : topics) {
std::cout << "Topic: " << name << " Type: " << type << std::endl;
}
return 0;
}
Transport configuration for the dds:// Fast-DDS RTPS backend.
Quality of Service (QoS) policy aggregate for VLink publishers and subscribers.
Kind kind
Durability kind.
Definition qos.h:145
@ kTransientLocal
DataWriter caches samples for late-joining readers.
Definition qos.h:140
Kind kind
Delivery guarantee kind.
Definition qos.h:102
@ kReliable
Retransmit until acknowledged.
Definition qos.h:99
Aggregate Quality of Service policy for a VLink communication endpoint.
Definition qos.h:86
Durability durability
Sample persistence policy.
Definition qos.h:308
Reliability reliability
Delivery guarantee policy.
Definition qos.h:306
环境变量:
# 设置默认 DDS Domain ID(所有 dds:// 节点使用,除非 URL 中显式指定 domain=)
export VLINK_DDS_DOMAIN=1
注意事项:
- ?qos= 和 ?qos_ext=(part/topic/pub/sub/writer/reader)互斥,同时设置导致验证失败。
- CDR 类型必须在创建节点前调用 register_topic() 注册 TypeSupport。
- 响应 Topic 自动使用 <topic>___resp 后缀,无需手动注册。
- 不同 Domain ID 的节点无法互相发现,确保同一应用内 Domain ID 一致。
ddsc:// — CycloneDDS
定位: Eclipse CycloneDDS,开源 DDS 实现,与 dds://(Fast-DDS)API 完全相同,适合偏好 Apache 协议或 CycloneDDS 生态的场景。
URL 格式:
ddsc://<topic>[?domain=<N>&depth=<N>&qos=<name>]
| DdscConf 参数 | 类型 | 必填 | URL 参数 | 说明 |
| topic | string | Yes | <host>/<path> | Topic 名称 |
| domain | int32_t | - | ?domain= | DDS 域 ID |
| depth | int32_t | - | ?depth= | 历史深度 |
| qos | string | - | ?qos= | QoS Profile 名称 |
URL 示例:
ddsc://vehicle/speed?domain=1&depth=10
ddsc://vehicle/speed?qos=sensor
与 dds:// 的差异:
- 不支持 register_topic() 和 qos_ext 扩展 QoS 映射。
- QoS 注册使用 DdscConf::register_qos()。
- 底层使用 CycloneDDS 而非 Fast-DDS,序列化行为一致(CDR)。
**依赖**:Eclipse CycloneDDS(find_package(CycloneDDS CONFIG)),可通过 Conan、发行版包或源码构建安装。
使用示例:
int main() {
DdscConf::register_qos("reliable", qos);
pub.publish(60.0f);
sub.listen([](const float& v) {
std::cout << "Speed: " << v << std::endl;
});
return 0;
}
Transport configuration for the ddsc:// CycloneDDS backend.
ddsr:// — RTI DDS
定位: RTI Connext DDS(商业 DDS 实现),适合需要 RTI 认证或 RTI 生态集成的场景。
URL 格式:
ddsr://<topic>[?domain=<N>&depth=<N>&qos=<name>]
| DdsrConf 参数 | 类型 | 必填 | URL 参数 | 说明 |
| topic | string | Yes | <host>/<path> | Topic 名称 |
| domain | int32_t | - | ?domain= | DDS 域 ID |
| depth | int32_t | - | ?depth= | 历史深度 |
| qos | string | - | ?qos= | QoS Profile 名称 |
| qos_ext | PropertiesMap | - | ?part=、?writer=、?reader= 等 | 扩展 QoS |
URL 示例:
ddsr://vehicle/speed?domain=1&qos=reliable
注意事项:
- 需要有效的 RTI 许可证文件(rti_license.dat)。
- 编译时需要链接 RTI DDS 库,CMake 需配置 NDDSHOME 环境变量。
- 当前处于 Beta 状态,建议生产环境充分测试。
ddst:// — TravoDDS
定位: TravoDDS 是国产开源 DDS 实现(项目仓库:https://gitee.com/agiros/travodds),作为 Fast-DDS / CycloneDDS / RTI Connext 之外的另一种 DDS 运行时选择。API 表面与 DdsConf 一致,底层替换为 TravoDDS 运行时。
URL 格式:
ddst://<topic>[?domain=<N>&depth=<N>&qos=<name>]
| DdstConf 参数 | 类型 | 必填 | URL 参数 | 说明 |
| topic | string | Yes | <host>/<path> | Topic 名称 |
| domain | int32_t | - | ?domain= | DDS 域 ID |
| depth | int32_t | - | ?depth= | 历史深度 |
| qos | string | - | ?qos= | QoS Profile 名称 |
| qos_ext | PropertiesMap | - | ?part=、?writer=、?reader= 等 | 扩展 QoS |
URL 示例:
ddst://perception/model/result?domain=1
与其他 DDS 的差异:
- 与 DdsConf(Fast-DDS)API 保持一致,通过切换 URL scheme 即可替换运行时。
- TravoDDS 是国产 DDS 实现(源码仓库 https://gitee.com/agiros/travodds),与 Fast-DDS / CycloneDDS 同样面向本地局域网/多播发现,不提供 NAT 穿透或云边桥接能力。
- 目前处于 Beta 状态,主要作为国产自主可控替代方案。
zenoh:// — Zenoh 协议
定位: Eclipse Zenoh,面向云-边-端统一数据管理的现代协议,支持发布/订阅、查询/回应,适合 IoT 和云边协同场景。
特点:
- 支持 P2P 和路由模式,内置 NAT 穿透。
- 支持 QoS Profile(通过 ZenohConf::register_qos() 注册)。
- URL 片段(#fragment)可携带 Zenoh 会话配置提示。
- 适合跨多个网络域(WiFi、5G、以太网)的通信。
URL 格式:
zenoh://<address>[?event=<name>&domain=<N>&qos=<name>&depth=<N>&shm=<0|1>&shm_size=<N>][#<fragment>]
| ZenohConf 参数 | 类型 | 必填 | URL 参数 | 说明 |
| address | string | Yes | <host>/<path> | Zenoh Key Expression(支持通配符,如 vehicle/*) |
| event | string | - | ?event= | 可选次级事件过滤 |
| domain | int32_t | - | ?domain= | Zenoh 会话/域标识符 |
| qos | string | - | ?qos= | 命名 QoS Profile |
| depth | int32_t | - | ?depth= | Zenoh transport/link/tx/queue/size/{data,real_time} 的 session 级队列深度(0 = 取所选 QoS 的 history.depth) |
| shm | string | - | ?shm= | 启用 Zenoh 共享内存(1/true/yes/on 或 0/false/no/off,仅 zenoh-c 且编译期带 Z_FEATURE_SHARED_MEMORY + Z_FEATURE_UNSTABLE_API 时生效) |
| shm_mode | string | - | ?shm_mode= | SHM 初始化模式:init(默认,立即建池)/ lazy(首次使用时建池) |
| shm_size | string | - | ?shm_size= | SHM 传输池大小,支持 B/K/M/G 后缀(写入 transport/shared_memory/transport_optimization/pool_size) |
| shm_threshold | string | - | ?shm_threshold= | Zenoh 自动 SHM 提升阈值(写入 transport/shared_memory/transport_optimization/message_size_threshold) |
| shm_loan_threshold | string | - | ?shm_loan_threshold= | VLink 用户 loan() API 的最小尺寸阈值,低于此值 loan() 回退到堆分配(默认 8K) |
| shm_blocking | string | - | ?shm_blocking= | 1/true 时 loan() 在池满时阻塞等待 GC + defrag,否则非阻塞失败 |
| fragment | string | - | #<hint> | 可选传输提示,例如 tcp / udp / unix / shm,或带地址的 tcp/host:port 等 |
这些参数同样可通过 set_property("zenoh.<key>", value) 在节点级覆盖;URL 参数与 set_property 经 ZenohConf::append_properties() 走同一条 factory 路径。
URL 示例:
zenoh://robot/joint/state
zenoh://robot/joint/state?domain=1&qos=realtime
zenoh://robot/joint/state?domain=1&qos=realtime&depth=10
zenoh://camera/raw?shm=1&shm_size=64M&shm_loan_threshold=4K
依赖**:zenohc(C 绑定)或 zenohpico(嵌入式轻量版)。CMake 中通过 find_package(zenohc CONFIG) 或 find_package(zenohpico CONFIG) 探测。当前 **不在 Conan 组件导出 中,需自行构建。
使用示例:
int main() {
ZenohConf::register_qos("reliable", qos);
pub.publish("{\"speed\": 80.5, \"fuel\": 45.2}");
sub.listen([](const std::string& data) {
std::cout << "Telemetry: " << data << std::endl;
});
setter.set(87.5f);
if (auto v = getter.get()) {
std::cout << "Battery: " << *v << "%" << std::endl;
}
ZenohConf conf("vehicle/123/speed", "", 0, "reliable", "udp/0.0.0.0:7447");
return 0;
}
Transport configuration for the zenoh:// Zenoh protocol backend.
注意事项:
- Zenoh 路由器(zenohd)需要在网络中部署,或使用 P2P 模式(VLINK_ZENOH_MODE=peer)。
- Key Expression 支持通配符,但 VLink 中通常使用精确地址。
- 在 MCU/嵌入式场景使用 zenoh-pico 时,功能有所裁减。
- Zenoh factory 可读取 VLINK_ZENOH_* 环境变量(config/mode/listen/peer/compression/lowlatency/timestamps/qos/event_qos/field_qos/method_qos/multicast*/gossip/rx_buf/tx_queue_data/tx_queue_rt/max_msg/batch_enabled/batch_time_limit_ms/allowed_locality/shm/shm_mode/shm_size/shm_threshold/shm_blocking/shm_loan_threshold),详见 21-environment-vars.md。
- 仅在 ?shm=1(或 VLINK_ZENOH_SHM=1)且编译期带 Z_FEATURE_SHARED_MEMORY + Z_FEATURE_UNSTABLE_API 时,节点的 is_support_loan() 才会返回 true、loan() 才走 Zenoh SHM;具体语义见 10-zerocopy.md。
someip:// — SOME/IP 车载以太网
定位: SOME/IP(Scalable service-Oriented MiddlewarE over IP)是 AUTOSAR 标准车载以太网通信协议,适合 ECU 间通信和 V2X 场景。
特点:
- 使用数字 ID 体系(Service ID、Instance ID、Method/Event ID),而非字符串 Topic。
- 通过 vsomeip 库实现,支持 SD(Service Discovery)协议。
- 字段模型(Setter/Getter)需要设置 field=true。
- 需要 vsomeip JSON 配置文件。
URL 格式:
# RPC(Server/Client)
someip://<service>/<instance>?method=<method_id>
# 事件(Publisher/Subscriber)
someip://<service>/<instance>?groups=<g1,g2,...>&event=<event_id>
# 字段(Setter/Getter)
someip://<service>/<instance>?groups=<g1,g2,...>&event=<event_id>&field=1
| SomeipConf 参数 | 类型 | 必填 | URL 参数 | 说明 |
| service | uint16_t | Yes | <host>(十进制或十六进制) | SOME/IP Service ID(16 位,非零) |
| instance | uint16_t | Yes | <path>(十进制或十六进制) | Service Instance ID(16 位,非零) |
| method | uint16_t | - | ?method= | Method ID(仅 Server/Client) |
| groups | set<uint16_t> | - | ?groups=g1,g2,... | Event Group ID 集合 |
| event | uint16_t | - | ?event= | Event ID |
| field | bool | - | ?field=1 | 是否为 Field 模式(Setter/Getter) |
所有数字支持十进制和十六进制(0x 前缀)两种格式。
URL 示例:
someip://0x1234/0x5678?method=0x1 # Method 调用
someip://0x1234/0x5678?groups=0x1,0x2&event=0x3 # Event 订阅
someip://0x1234/0x5678?groups=0x1&event=0x3&field=1 # Field 同步
依赖**:COVESA vsomeip3(find_package(vsomeip3 CONFIG))。当前 **不在 Conan 组件导出 中,需自行构建。
vsomeip 配置文件(最小示例):
{
"unicast": "127.0.0.1",
"logging": {
"level": "warning"
},
"applications": [
{
"name": "my_app",
"id": "0x1234"
}
],
"services": [
{
"service": "0x1234",
"instance": "0x5678",
"unreliable": "30509"
}
]
}
使用示例:
int main() {
SomeipConf::load_global_config_file("/etc/vsomeip/vsomeip.json");
server.listen([](const int& req, int& resp) {
resp = req * 2;
});
auto result = client.invoke(21);
pub.publish(80.5f);
sub.listen([](const float& v) {
std::cout << "Speed: " << v << std::endl;
});
Setter<float> setter(
"someip://4660/22136?groups=1&event=16&field=1");
setter.set(80.5f);
Getter<float> getter(
"someip://4660/22136?groups=1&event=16&field=1");
if (auto v = getter.get()) {
std::cout << "Field: " << *v << std::endl;
}
SomeipConf rpc_conf(0x1234, 0x5678, 0x0001);
SomeipConf evt_conf(0x1234, 0x5678, {0x0001}, 0x0010);
SomeipConf fld_conf(0x1234, 0x5678, {0x0001}, 0x0010, true);
return 0;
}
Transport configuration for the someip:// SOME/IP (vsomeip) backend.
注意事项:
- service 和 instance 均不能为 0,否则 is_valid() 返回 false。
- 事件/字段节点必须同时设置 groups 和 event,否则验证失败。
- 字段节点(Setter/Getter)必须设置 field=true。
- vsomeip 需要网络权限,可能需要 root 或 CAP_NET_RAW。
- VSOMEIP_CONFIGURATION 环境变量可指定 vsomeip 配置文件路径。
mqtt:// — MQTT 物联网协议
定位: MQTT(Message Queuing Telemetry Transport)是面向物联网的轻量级发布/订阅消息协议,适合带宽受限、网络不稳定的跨机器通信场景。
特点:
- 基于 TCP/TLS 的轻量级发布/订阅协议,协议开销极小。
- 需要外部 MQTT Broker(如 Mosquitto、EMQX)。
- 支持全部六种节点类型(Publisher/Subscriber、Server/Client、Setter/Getter)。
- 支持部分 QoS 配置。
URL 格式:
mqtt://<address>[?event=<name>&domain=<N>&qos=<0|1|2>][#<broker_uri>]
| MqttConf 参数 | 类型 | 必填 | URL 参数 | 默认值 | 说明 |
| address | string | Yes | <host>/<path> | — | MQTT Topic 地址 |
| event | string | - | ?event= | "" | 可选次级事件过滤 |
| domain | int32_t | - | ?domain= | 0 | 域/命名空间标识 |
| qos | int32_t | - | ?qos=0/1/2 | 1 | MQTT QoS 级别(0/1/2) |
| fragment | string | - | #<uri> | "" | broker URI 覆盖(如 tcp://ip:1883) |
URL 示例:
mqtt://sensor/temperature
mqtt://vehicle/telemetry?event=speed&qos=2
mqtt://sensor/data#tcp://192.168.1.1:1883
**MQTT 环境变量**(读取自源码 modules/mqtt/mqtt_factory.cc):
| 变量 | 默认值 | 说明 |
| VLINK_MQTT_BROKER | tcp://localhost:1883 | MQTT Broker URI |
| VLINK_MQTT_DOMAIN | 0 | 默认 domain |
| VLINK_MQTT_QOS | 1 | 默认 QoS(0/1/2) |
| VLINK_MQTT_KEEPALIVE | 60 | 心跳保活间隔(秒) |
| VLINK_MQTT_CLIENT_ID | vlink_mqtt | 客户端 ID 前缀 |
依赖**:Eclipse Paho MQTT C 客户端(eclipse-paho-mqtt-c::paho-mqtt3c 或 paho-mqtt3cs 带 TLS)。当前 **不在 Conan 组件导出 中,需自行构建。
使用示例:
int main() {
pub.publish("{\"temp\": 25.6}");
sub.listen([](const std::string& msg) {
std::cout << "Received: " << msg << std::endl;
});
return 0;
}
Transport configuration for the mqtt:// MQTT protocol backend.
注意事项:
- 需要外部 MQTT Broker 运行,VLink 作为 MQTT 客户端连接到 Broker。
- 实时性相对 DDS 和 SHM 后端较低,适合对延迟不敏感的场景。
- 当前处于 Beta 状态。
fdbus:// — FDBus IPC
定位: FDBus 是面向 Android 和 Linux 的轻量级 IPC 框架,类似于 D-Bus 但更轻量,适合车载 Linux 系统的同机 IPC。
特点:
- 支持服务注册(svc 模式)和直接 P2P IPC(ipc 模式)。
- 通过 URL 片段(#svc 或 #ipc)选择模式,默认 svc。
- 支持全部六种节点类型。
- 比共享内存延迟略高,但比 DDS 低。
URL 格式:
fdbus://<address>[?event=<name>][#svc|#ipc]
| FdbusConf 参数 | 类型 | 必填 | URL 参数 | 说明 |
| address | string | Yes | <host>/<path> | FDBus 服务/主题地址 |
| event | string | - | ?event= | 可选次级事件名称 |
| transport | string | - | #svc / #ipc | 连接模式(默认 svc) |
连接模式:
- #svc:通过服务注册中心发现(默认)
- #ipc:直接点对点连接
URL 示例:
fdbus://my_service
fdbus://my_service?event=notify
fdbus://my_service#ipc
依赖**:FDBus(运行时库)。当前 **不在 Conan 组件导出 中,需自行构建。
使用示例:
int main() {
pub.publish("hello from fdbus");
sub.listen([](const std::string& msg) {
std::cout << msg << std::endl;
});
FdbusConf conf("my_service", "speed_event", "svc");
server.listen([](const int& req, int& resp) { resp = req * 3; });
auto result = client.invoke(7);
return 0;
}
Transport configuration for the fdbus:// FDBus IPC backend.
注意事项:
- transport 只支持 "svc" 和 "ipc" 两个值,其他值使 is_valid() 返回 false。
- address 不能为空,否则 is_valid() 返回 false。
- FdbusConf::operator== 不比较 transport 字段(源码 fdbus_conf.h:140-142),仅比较 address 和 event。
- FDBus 名称服务需要在系统中运行(fdbus-nameserver)才能使用 svc 模式。
qnx:// — QNX 实时 IPC
定位: 基于 QNX Neutrino RTOS 原生 IPC 原语的通信后端,提供确定性实时消息传递,适合功能安全(ASIL)场景。
特点:
- 使用 QNX 原生 IPC(Pulse/Message Passing),确定性延迟。
- **仅在 QNX 目标平台可用**,不可在 Linux 上使用。
- 支持全部六种节点类型。
- 无需第三方库,直接使用 QNX SDK。
URL 格式:
qnx://<address>[?event=<name>]
| QnxConf 参数 | 类型 | 必填 | URL 参数 | 说明 |
| address | string | Yes | <host>/<path> | QNX 通道/主题名称 |
| event | string | - | ?event= | 可选次级事件过滤 |
URL 示例:
qnx://controller/joint_state
qnx://controller/joint_state?event=updated
使用示例:
int main() {
sub.listen([](const float& v) {
});
pub.publish(9.8f);
QnxConf conf("sensor/imu", "accelerometer");
return 0;
}
Transport configuration for the qnx:// QNX IPC backend.
注意事项:
- 该后端仅在 QNX Neutrino RTOS 上可用,在 Linux 编译时此头文件内容为空(#ifdef VLINK_SUPPORT_QNX)。
- modules/qnx/CMakeLists.txt 的 SKIP_QNX 选项**默认 ON**:即使在 QNX 工具链下也要显式 -DSKIP_QNX=OFF 才会编译该模块。类似地,ddsr / ddst / fdbus 也因依赖专有 SDK 或系统服务而默认跳过。
- address 不能为空,否则 is_valid() 返回 false。
- QNX IPC 通道需要适当的权限配置。
7.5 后端混合使用与 Bridge
VLink 支持在同一进程内同时使用多个传输后端,常见的混合场景:
场景 1:进程内加速 + 跨机通信
SensorData data = read_sensor();
intra_pub.publish(data);
dds_pub.publish(data);
场景 2:协议桥接(Bridge)
shm_sub.listen([&dds_pub](
const Bytes& frame) {
dds_pub.publish(compressed);
});
static Bytes compress_data(const uint8_t *data, size_t size, bool high_ratio=false) noexcept
Compresses a raw byte buffer using the LZAV algorithm.
场景 3:字段模型跨后端同步
local_getter.listen([&remote_setter](const VehicleState& state) {
remote_setter.set(state);
});
场景 4:开发测试阶段逐步切换
const char* transport = std::getenv("VLINK_TRANSPORT");
std::string url = std::string(transport ? transport : "intra") + "://vehicle/speed";
pub.publish(80.5f);
7.6 全局初始化与生命周期管理
部分后端需要显式初始化和清理:
int main() {
vlink::ShmConf::init_runtime("my_process_name");
vlink::SomeipConf::load_global_config_file("/etc/vsomeip/vsomeip.json");
vlink::DdsConf::load_global_qos_file("/etc/vlink/dds_qos.xml");
vlink::DdsConf::register_qos("reliable", qos);
vlink::ShmConf::deinit_runtime();
return 0;
}
Versatile byte buffer with small-buffer optimisation, ownership semantics and compression.
static void init_memory_pool() noexcept
Initialises the global thread-safe memory pool for Bytes allocations.
static void release_memory_pool() noexcept
Releases the global memory pool and returns its memory to the OS.
各后端初始化要求汇总:
| 后端 | 初始化调用 | 清理调用 |
| intra:// | 无需 | 无需 |
| shm:// | ShmConf::init_runtime() 或 ShmConf::init_roudi() | ShmConf::deinit_runtime() |
| shm2:// | 无需(自治管理) | 无需 |
| dds:// | 可选 DdsConf::load_global_qos_file(),register_qos() | 节点析构时自动清理 |
| ddsc:// | 可选 DdscConf::register_qos() | 节点析构时自动清理 |
| zenoh:// | 可选 ZenohConf::register_qos() | 节点析构时自动清理 |
| someip:// | SomeipConf::load_global_config_file()(推荐) | 节点析构时自动清理 |
| mqtt:// | 无需(需外部 MQTT Broker 运行) | 节点析构时自动清理 |
| fdbus:// | 无需(FDBus 名称服务在系统级运行) | 节点析构时自动清理 |
| qnx:// | 无需 | 节点析构时自动清理 |
传输后端选择性初始化:
可通过 Url::global_init() 控制只加载所需的传输插件,减少启动时间和内存占用:
@ kEnableDds
Enable dds:// (Fast-DDS) transport.
Definition url.h:193
@ kEnableIntra
Enable intra:// transport.
Definition url.h:189
@ kEnableAll
Enable all transports.
Definition url.h:201
static void global_init(uint16_t transport_enable_flags=0)
Initialises the global state for all enabled transport backends.
Definition url.h:529
7.7 URL 重映射
通过 VLINK_URL_REMAP 环境变量指定一个 **JSON 配置文件路径**,可在不修改代码的情况下替换传输后端。
第一步:创建 JSON 重映射文件
// /etc/vlink/remap.json
{
"dds://sensor/imu": "shm://sensor/imu",
"dds://sensor/lidar": "shm://sensor/lidar",
"intra://camera/front": "zenoh://camera/front"
}
JSON 格式为扁平的键值对对象:key 是源 URL(或其子串),value 是目标 URL。匹配算法为**子串匹配**——当输入 URL 包含某条规则的 key 时,该规则的 value 即为重映射结果。规则按声明顺序匹配,首个命中的规则生效。
第二步:设置环境变量
export VLINK_URL_REMAP="/etc/vlink/remap.json"
效果: 代码中使用 dds://sensor/imu,运行时 VLink 自动将其替换为 shm://sensor/imu,实现零代码修改切换传输。
API 使用方式(可选):
除环境变量外,也可在代码中直接使用 UrlRemap 类:
remap.
load(
"/etc/vlink/remap.json");
std::string actual = remap.
convert(
"dds://sensor/imu");
remap.
reload(
"/etc/vlink/new_remap.json");
Loads a JSON remap file and translates VLink URL strings at runtime.
Definition url_remap.h:83
const std::string & convert(const std::string &url) noexcept
Translates url according to the loaded remap rules.
bool reload(const std::string &file_path) noexcept
Unloads the current configuration and loads a new one atomically.
bool load(const std::string &file_path) noexcept
Loads and parses a JSON remap configuration from file_path.
JSON-driven URL remapping for VLink topic address translation.
注意: VLINK_URL_REMAP 的值是**文件路径**而非映射规则本身。VLink 在首次创建 Url 对象时自动加载该文件,并对所有后续 URL 进行子串匹配转换。转换结果会被缓存以避免重复匹配开销。
详见 环境变量文档。
相关文档: