|
VLink 2.0.0
A high-performance communication middleware
|
|
VLink 2.0.0
A high-performance communication middleware
|
单页索引:**最常用的 API、URL、QoS、CLI、环境变量**。用于"我记得有这个,但叫什么来着"时快速回忆。
需要完整解释时回到 根 README 的「Part II-V」章节。
目录:
**工厂与构造**(所有原语都有四种):
| Publisher | Subscriber |
|---|---|
| bool publish(const T& msg, bool force=false) | bool listen(MsgCallback&&) |
| bool publish_fbb(const void* fbb, bool force=false) | void set_manual_unloan(bool) |
| void detect_subscribers(ConnectCallback&&) | void set_latency_and_lost_enabled(bool) |
| bool wait_for_subscribers(timeout=5000ms) | bool is_latency_and_lost_enabled() const |
| bool has_subscribers() const | int64_t get_latency() const |
| void mark_as_setter() | SampleLostInfo get_lost() const |
| void mark_as_getter() |
| Server | Client |
|---|---|
| bool listen(ReqCallback&&) — fire-and-forget | bool invoke(req, resp&, timeout) — sync by out-param |
| bool listen(ReqRespCallback&&) — sync reply | std::optional<Resp> invoke(req, timeout) — sync optional |
| bool listen_for_reply(ReqAsyncRespCallback&&) | bool invoke(req, RespCallback&&) — async callback |
| bool reply(uint64_t req_id, const Resp&) — async answer | std::future<Resp> async_invoke(req) — future |
| bool send(req) — no response | |
| void detect_connected(ConnectCallback&&) | |
| bool wait_for_connected(timeout) | |
| bool is_connected() const |
| Setter | Getter |
|---|---|
| void set(const V&) | std::optional<V> get() const |
| void mark_as_publisher() | bool wait_for_value(timeout) |
| bool listen(MsgCallback&&) | |
| void set_change_reporting(bool) — only on change | |
| void set_manual_unloan(bool) | |
| void set_latency_and_lost_enabled(bool) | |
| int64_t get_latency() const | |
| SampleLostInfo get_lost() const | |
| void mark_as_subscriber() |
**安全别名**:SecurityPublisher<T> ≡ Publisher<T, SecurityType::kWithSecurity>(其余五个同理)。
所有 6 种原语都从 Node<ImplT, SecT>(include/vlink/node.h)派生,共享这些方法:
| 方法 | 作用 |
|---|---|
| bool init() / bool deinit() / void interrupt() | 显式生命周期 |
| bool has_inited() const | init 是否完成 |
| bool is_support_loan() const | 该 transport 是否支持零拷贝 |
| Bytes loan(int64_t size) | 借一块共享内存 |
| bool return_loan(const Bytes&) | 归还 loan |
| void set_manual_unloan(bool) / bool is_manual_unloan() const | 订阅端手动归还开关 |
| bool suspend() / bool resume() / bool is_suspend() const | 暂停/恢复 |
| bool attach(MessageLoop*) / bool detach() | 绑定到外部 MessageLoop |
| MessageLoop* get_message_loop() const | 获取当前 MessageLoop |
| TransportType get_transport_type() const | 返回 kShm / kDds / … |
| const std::string& get_url() const | 构造时传入的完整 URL |
| void set_property(key, value) / std::string get_property(key) const | 自定义属性(会在 Discovery 广播) |
| void set_ser_type(ser, schema_type) / const std::string& get_ser_type() / SchemaType get_schema_type() | 显式序列化类型名 |
| void set_discovery_enabled(bool) / bool get_discovery_enabled() | 开关本节点的 Discovery 上报 |
| void set_security_key(key) / void set_security_callbacks(enc, dec) | 加密(二选一) |
| void set_record_path(path) | 用 BagWriter 单节点旁路录制 |
| void set_ssl_options(SslOptions) | TLS 配置(ddsc/mqtt/zenoh) |
| void bind_proto_arena(void*) | 绑定 Google Arena(Protobuf) |
| double get_cpu_usage() const | 本节点 CPU 占比(Discovery 会广播) |
| bool get_safety_quit() / set_safety_quit(bool) | 退出前安全排空 |
| Status::BasePtr get_status(Status::Type) const / register_status_handler(cb) | 状态查询与回调 |
| const AbstractNode* get_abstract_node() const | 调试用,获取底层抽象 |
**ImplType(位掩码 uint8_t)**:kUnknownImplType=0,kPublisher=1,kSubscriber=2,kSetter=4,kGetter=8,kServer=16,kClient=32。mark_as_* 方法对应位翻转。
**TransportType(uint8_t)**:kUnknown=0,kIntra=1,kShm=2,kShm2=3,kZenoh=4,kDds=5,kDdsc=6,kDdsr=7,kDdst=8,kSomeip=9,kMqtt=10,kFdbus=11,kQnx=12。
**InitType**:kWithoutInit=0(延迟 init),kWithInit=1(构造时即 init,默认)。
**SecurityType**:kWithoutSecurity=0,kWithSecurity=1。
**ActionType**:kUnknownAction=0,kClientRequest=1,kClientResponse=2,kServerRequest=3,kServerResponse=4,kPublish=5,kSubscribe=6,kSet=7,kGet=8。
**SchemaType**:kUnknown=0,kRaw=1,kZeroCopy=2,kProtobuf=3,kFlatbuffers=4。
**Logger::Level**(base/logger.h):kTrace=0,kDebug=1,kInfo=2,kWarn=3,kError=4,kFatal=5,kOff=6。
**Timeout**:kDefaultInterval = 5000ms,kInfinite = -1。
| URL 前缀 | 底层 | 范围 | 零拷贝 | 典型用途 |
|---|---|---|---|---|
| intra:// | 内置 lock-free 队列 | 同进程 | ✅ | 进程内最低延迟 |
| shm:// | **Iceoryx**(推荐 vlink-proxy -c 内嵌起 iox-roudi) | 同机跨进程 | ✅ | 相机/点云 |
| shm2:// | Iceoryx2 | 同机跨进程 | ✅ | 下一代 SHM(beta) |
| dds:// | **Fast-DDS**(eProsima) | 跨机 | ❌ | 多 ECU 协同(稳定) |
| ddsc:// | **CycloneDDS**(Eclipse) | 跨机 | ❌ | 轻量跨机(稳定) |
| ddsr:// | RTI Connext | 跨机 | ❌ | 工业高可靠(beta) |
| ddst:// | **TravoDDS**(国产 DDS) | 跨机 | ❌ | 国产 DDS 替代(beta) |
| zenoh:// | Zenoh (zenoh-c / pico) | 跨机/云边 | ❌ | IoT 边缘(beta) |
| someip:// | vsomeip3 | 车载以太网 | ❌ | ECU 服务化(beta) |
| mqtt:// | Paho MQTT | 跨机/云 | ❌ | IoT 云端(beta) |
| fdbus:// | FDBus | 同机 | ❌ | Android/Linux 混合(beta) |
| qnx:// | QNX IPC | 同机(QNX) | ❌ | QNX 实时(beta) |
**URL 模板**:<scheme>://[<host>[:<port>]]/<path>[?<query>][#<frag>]
| Transport | 关键 query | 默认 |
|---|---|---|
| intra:// | event=<name>、pipeline=<int>(pipeline depth) | event=""、pipeline=1 |
| shm:// | domain=<int>、depth=<int>、history=<int>、wait=0\|1 | 0 / 1 / 1 / 0 |
| shm2:// | 与 shm:// 相同;额外通过 VLINK_SHM2_CONFIG 指定 TOML | 同上 |
| dds:// / ddsc:// / ddsr:// / ddst:// | domain=<int>、depth=<int>、qos=<profile>;保留 part/topic/pub/sub/writer/reader 作 QoS 扩展键 | 0 / 1 / "" |
| zenoh:// | domain=<int>、event=<name>、qos=<profile>、depth=<int>(覆盖 session 级 TX 队列深度)、shm=<0\|1>、shm_mode=init\|lazy、shm_size=<bytes>(支持 K/M/G)、shm_threshold=<bytes>、shm_loan_threshold=<bytes>(用户 loan() 最小尺寸阈值,默认 8K)、shm_blocking=<0\|1>;#fragment = 模式提示(tcp/udp/unix/shm 或带地址的 tcp/host:port) | 0 / "" / "" / 0 |
| someip:// | service=<hex>、instance=<hex>、method=<hex> 或 event=<hex> | 0 / 0 / 0 |
| mqtt:// | domain=<int>、qos=<0\|1\|2>、event=<name>;#fragment = broker URI 提示 | 0 / 1 / "" |
| fdbus:// / qnx:// | 基本 path + event= | — |
**能力速记**:shm/shm2 默认支持 loan();zenoh 在 ?shm=1 且构建带 Z_FEATURE_SHARED_MEMORY + Z_FEATURE_UNSTABLE_API 时支持;其余后端 is_support_loan() 返回 false。intra 不走序列化(类型必须"可共享的");dds:// + CDR 不走 VLink 安全管道。
源:include/vlink/extension/qos.h
**优先级枚举**:kPriorityRealTime=1、kPriorityHigh=2、kPriorityNormal=4(默认)、kPriorityLow=6、kPriorityBackground=7。
源:include/vlink/extension/qos_profile.h(13 个)
| Profile | Reliability | History | Durability | PubMode | 优先级 | 典型场景 |
|---|---|---|---|---|---|---|
| kEvent | Reliable | KeepLast(10) | Volatile | Sync | RealTime | 离散控制事件 |
| kMethod | Reliable | KeepAll | Volatile | Sync | High | RPC 请求响应 |
| kField | Reliable | KeepLast(1) | TransientLocal | Sync | High | 最新值状态同步 |
| kSensor | BestEffort | KeepLast(20) | Volatile | ASync | Normal | 高频传感器 |
| kParameter | Reliable | KeepLast(1000) | Volatile | Sync | Normal | 配置参数 |
| kService | Reliable | KeepLast(10) | TransientLocal | Sync | Normal | 服务发现 |
| kClock | BestEffort | KeepLast(1) | Volatile | ASync | Low | 时间同步 |
| kStatic | Reliable | KeepAll | TransientLocal | Sync | Normal | 静态/地图数据 |
| kLight | Reliable | KeepLast(1) | Volatile | ASync | High | 轻量快速 |
| kPoor | BestEffort | KeepLast(5) | Volatile | ASync | Background | 低优先 |
| kBetter | BestEffort | KeepLast(50) | Volatile | Sync | RealTime | 高吞吐 best-effort(同步发送) |
| kBest | Reliable | KeepLast(200) | Volatile | Sync | RealTime | 高吞吐 reliable(同步发送) |
| kLarge | Reliable | KeepLast(500) | Volatile | Sync | Low | 大负载(延长心跳) |
**运行时用法**:
自定义 Qos**:构造 vlink::Qos,逐个设置子策略,**必须把 valid = true 才会应用。
编译期按以下顺序命中第一个(源:include/vlink/internal/serializer-inl.h:160-192):
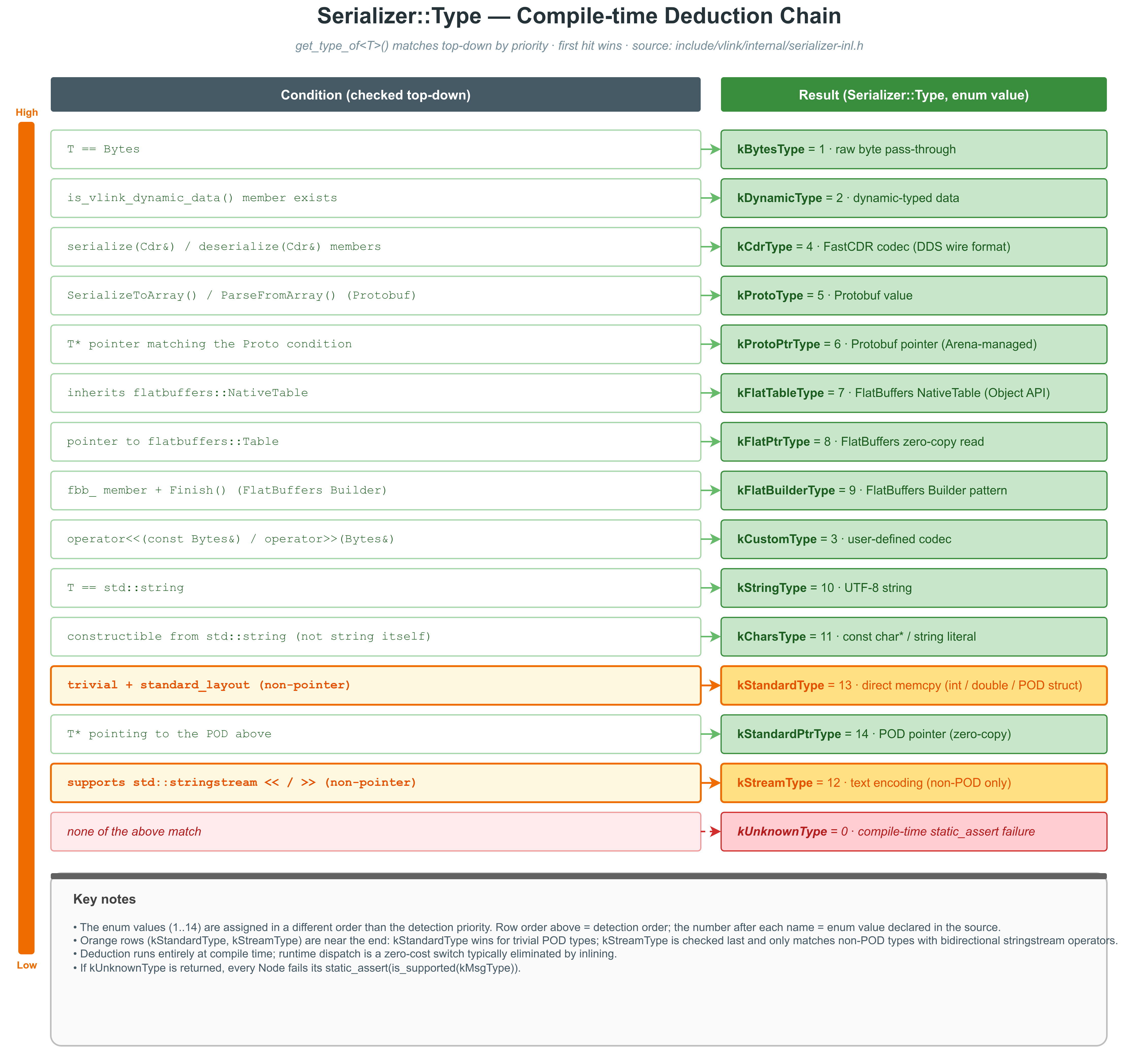
**Serializer::Type 完整枚举**(serializer.h:123-139):
| 枚举 | 值 | 依赖 | 典型 T |
|---|---|---|---|
| kUnknownType | 0 | — | 不支持 → static_assert |
| kBytesType | 1 | — | vlink::Bytes |
| kDynamicType | 2 | — | 含 is_vlink_dynamic_data() |
| kCustomType | 3 | — | 实现 operator>>/<<(Bytes) |
| kCdrType | 4 | FastCDR | 有 serialize(Cdr&) |
| kProtoType | 5 | protobuf | MyProto(派生 MessageLite) |
| kProtoPtrType | 6 | protobuf | MyProto* Arena |
| kFlatTableType | 7 | flatbuffers | MyTableT : flatbuffers::NativeTable |
| kFlatPtrType | 8 | flatbuffers | MyTable*(从 GetRoot) |
| kFlatBuilderType | 9 | flatbuffers | 自建 Builder |
| kStringType | 10 | — | std::string |
| kCharsType | 11 | — | const char* / 字符串字面量 |
| kStreamType | 12 | — | 支持 stringstream<< 双向流,且**非** POD |
| kStandardType | 13 | — | trivial + standard_layout(POD) |
| kStandardPtrType | 14 | — | POD 指针 |
**重点**:int / double / 纯 POD 先命中 **kStandardType**(memcpy 二进制);要走 kStreamType 必须**非 trivial**(加 std::string 之类)。
**Callback 签名**:
**SSL / TLS**(ddsc / mqtt / zenoh 的 TCP 通道适用):通过 SslOptions 或 env 变量 VLINK_SSL_VERIFY / _CA / _CERT / _KEY / _KEY_PASS / _SNI / _CIPHERS 配置。
**数据容器**(include/vlink/zerocopy/):
**Bytes 五种所有权模式**(源:base/bytes.h:42-48):
| 工厂 | 拥有内存 | 典型用途 |
|---|---|---|
| Bytes::create(n) | ✅ | 新分配(≤96 B 走 SBO) |
| Bytes::shallow_copy(ptr, n) | ❌ | 零拷贝包装外部缓冲 |
| Bytes::deep_copy(ptr, n) | ✅ | 外部数据的 owned 副本 |
| Bytes::loan_internal(...) | ❌(借用) | Iceoryx 零拷贝 loan |
| Bytes::shallow_copy_ptr(ptr) | ❌ | 包装不透明指针(size=0) |
Bytes 对象总是 **128 字节**固定大小(96 B SBO + meta)。
源:base/logger.h。四种风格 × 6 个级别 = 24 条。
| 风格 | 例子 | 什么时候用 |
|---|---|---|
| 流式 VLOG_X | VLOG_I("frame=", id, " lat=", ms, "ms"); | 默认选这个;变量多、零分配 |
| **{} 格式化** MLOG_X | MLOG_W("t={} C", temp); | 需要 Python/fmt 风格 |
| printf 风格 CLOG_X | CLOG_E("errno=d", errno); | 兼容 C 代码里的老格式 |
| RAII 流 SLOG_X | SLOG_D << "values: " << a << " " << b; | 想用 << 运算符链 |
后缀 _X ∈ {_T, _D, _I, _W, _E, _F} 对应 kTrace/Debug/Info/Warn/Error/Fatal。
**编译期消除**:VLINK_LOG_LEVEL 宏设为 3(kWarn)后,VLOG_T、VLOG_D 在 Release 下被编译器整条消除(零指令)。
**运行时配置**:VLINK_LOG_LEVEL=0..6 总级别;VLINK_LOG_CONSOLE_LEVEL / VLINK_LOG_FILE_LEVEL 分别控制 sink。
**Backtrace**:
**Config 关键字段**(extension/bag_writer.h:122-144):
| 字段 | 默认 | 说明 |
|---|---|---|
| tag_name | "" | bag 头标签 |
| compress | kCompressNone | 枚举 kCompressNone/Auto/Zstd/Lz4/Lzav;SQLite 仅识别 Auto/Lzav(实际走 LZAV),MCAP 仅识别 Auto/Zstd(实际走 Zstd) |
| compress_start_size | 128 | 小于该字节数不压缩 |
| compress_level | 3 | 编码器特定 level |
| split_by_size | 1 GiB | 按字节数切分 |
| split_by_time | 0 ms | 按时间切分(0 = 关) |
| wal_mode | false | SQLite WAL |
| enable_limit | false | 启用 max_row / max_bytes 上限 |
| max_row_count | 5e9 | 启用 limit 时生效 |
| max_bytes_size | 512 GiB | 启用 limit 时生效 |
| max_task_depth | 20000 | 最大排队写任务 |
| max_memory_size | 2 GiB | 内存缓冲上限 |
| cache_size | 4 MiB | SQLite page cache |
| sync_mode | false | 同步 fsync |
| optimize_on_exit | false | 关闭时 VACUUM |
| ignore_compress_urls | {} | 指定 URL 永不压缩 |
**Config 字段**(extension/bag_reader.h:181-191): begin_time/end_time(ms,0 = 从头/到尾)、times(-1 = 无限)、rate(默认 1.0)、skip_blank(跳过静默段)、force_delay(-1 = 用原始间隔)、auto_pause(每条暂停)、auto_quit(结束后退出)、filter_urls。
**格式识别**:.vdb/.vdbx → SQLite(DatabaseWriter);<tt>.vcap/.vcapx → MCAP(McapWriter)。
**FilterType**:kFilterNone=0 / kFilterAvailable=1 / kFilterNative=2。
**Discovery 组播地址**:239.255.0.100(src/extension/discovery_reporter.cc)。
**Env 开关**:VLINK_DISCOVER_DISABLE=1 关掉;VLINK_DISCOVER_NATIVE=1 限本机。
vlink-proxy 是 VLink 的**远程监控守护进程**(proxy/proxy.cc):
**ProxyAPI 嵌入式使用**:
**ProxyAPI::Mode**:kOffline=0/kObserveOne=1/kObserveAll=2/kRecord=3/kPlay=4/kEdit=5/kAuto=6/kAutoAndObserveAll=7。
**Error codes**:kNoError=0/kModeError=1/kControlError=2/kReliableCompError=3/kTcpCompError=4/kDirectCompError=5/kMultiProxyError=7/kVersionCompError=8/kUnknownError=9。
源:include/vlink/external/c_api.h。Python / Rust / Go 通过 C ABI 调用。
**返回码 vlink_ret_t**:VLINK_RET_UNKNOWN_ERROR=-1 / VLINK_RET_NO_ERROR=0 / VLINK_RET_UNEXPECTED_ERROR=1 / VLINK_RET_INVALID_ERROR=2 / VLINK_RET_MEMORY_ERROR=3 / VLINK_RET_RUNTIME_ERROR=4 / VLINK_RET_TRANSFER_ERROR=5。
**Schema 类型 vlink_schema_t**:VLINK_SCHEMA_UNKNOWN=0 / _RAW=1 / _ZEROCOPY=2 / _PROTOBUF=3 / _FLATBUFFERS=4。
**Handle 类型**(每种通信原语一个):vlink_publisher_handle_t、_subscriber_handle_t、_server_handle_t、_client_handle_t、_setter_handle_t、_getter_handle_t。每个都是 { void* native_handle; void* reserved[4]; }。
**核心函数**(签名精简自 c_api.h,所有函数返回 int,值为 vlink_ret_t):
头文件为纯 C,用 #ifdef __cplusplus extern "C" 保护;编译宏 VLINK_C_API_EXPORT 控制可见性。
所有工具都支持 -h/--help 和 -v/--version。安装后同时暴露无前缀别名(bag / bench 等)。
| 工具 | 一句话 | 顶层子命令 |
|---|---|---|
| vlink-info | 版本 / 编译选项 | —(只有 -l) |
| vlink-check | 系统诊断 | diag / env / test |
| vlink-list | 列活动节点 | — |
| vlink-monitor | 实时 TUI 监控 | — |
| vlink-bag | 录制 / 回放 / bag 管理 | record / play / info / clone / check / reindex / fix / tag |
| vlink-dump | URL / bag 抽数据 | — |
| vlink-eproto | Protobuf 动态 pub/sub | pub / sub |
| vlink-efbs | FlatBuffers 动态 pub/sub | pub / sub |
| vlink-bench | 基准测试 + 报告 | run / plot / pub / sub |
| (额外) vlink-proxy | 远程监控 + 内嵌 iox-roudi | —(见上节) |
| 短/长参数 | 类型 | 默认 | 说明 |
|---|---|---|---|
| path(位置参数) | string | — | 录制输出文件(<tt>.vdb / .vdbx / .vcap / .vcapx) |
| -u, --urls | string 列表 | [] | 录制的 URL 列表(可多个) |
| -t, --tag | string | "" | bag 头标签 |
| -i, --filter | string | "" | URL 关键字过滤 |
| -k, --black | bool | false | 黑名单模式(反过滤) |
| -n, --native | bool | false | 仅录本机节点 |
| -d, --duration | double 秒 | 0 | <=0 表示不限 |
| -w, --wait | double 秒 | 30 | 退出前最长等待排空时间 |
| -p, --compress | bool | false | 启用压缩(SQLite 走 LZAV / MCAP 走 Zstd) |
| -f, --force | bool | false | 覆盖已有文件 |
| -q, --quiet / -l, --detail | bool | false | 输出繁简 |
| -o, --split_name_by_time | bool | false | 切分文件名附时间 |
| -z, --split_by_size | double GB | 1.0 | 按大小切分(需用 vdbx/vcapx 后缀) |
| -y, --split_by_time | double 秒 | 0 | 按时间切分(0 关) |
| -g, --deft | bool | false | 跳过序列化信息采集 |
| -x, --max_packet_size | double MB | 4.0 | 单消息字节数超过此阈值则丢弃 |
| -j, --wal_mode | bool | false | SQLite WAL |
| -c, --cache_size | double MB | 4.0 | SQLite page cache |
| -s, --sync_mode | bool | false | fsync 同步 |
| --max_task_depth | int | 20000 | 排队写任务上限 |
| --max_memory_size | double GB | 2.0 | 内存上限 |
| --enable_limit / --max_row_count / --max_bytes_size | — | — | 行数/字节上限(max_bytes_size 单位 GB) |
| --compress_level | int | 3 | 压缩 level(1~5,0 表示默认) |
| --ignore_compress | string 列表 | [] | 指定 URL 不压缩 |
-u/--urls、-i/--filter、-k/--black、-n/--native、-s/--actions(默认 [6],即仅 Sub;5=Pub / 6=Sub,参考 ActionType)、-b/--begin_time(秒,0 从头)、-e/--end_time(秒,0 到尾)、-t/--times(默认 1,<=0 表示无限循环)、-r/--rate(默认 1.0,范围 0.01~100)、-q/--quiet、-l/--detail、-m/--skip_blank、-j/--auto_pause、--local_time/--utc_time、--rel_begin_time/--rel_end_time/--local_begin_time/--local_end_time/--utc_begin_time/--utc_end_time、--plugin <name>。
-p/--preset = quick/full;-u/--url(可重复);-s/--suite = throughput/latency/topology/serialization/backpressure(参考 Bench::Suite);-m/--mode = local-direct/local-loop/process;-t/--topology = 1:1/1:n/n:1/n:n;--pattern = max/fixed/burst;-k/--payload = bytes/string/rawdata;-q/--qos <profile>;--size / --latency-size / --topology-size(列表);-r/--rate(列表 Hz);-f/--fanout(列表);--publishers(列表);--burst(列表);--property / --pub-property / --sub-property;--report = html/json/csv/terminal/both(可重复);--no-pager;-o prefix;--verbose。
vlink-bench plot <bench.json> [--report …] [--no-pager] [-o prefix]:从已有 JSON 重绘报告,不重跑。
vlink-bench pub / sub:process 模式下由 run 内部 spawn,不手工调用。
IP 地址、VLINK_DDS_IP、VLink 组播路由(239.255.0.100)、DDS 组播路由(239.255.0.1)、日志盘空间、CPU 使用率、内存使用率、以及各 CLI / viewer 是否在跑(proxy/bag/dump/eproto/monitor/viewer/player/analyzer 等)。
pub / sub 两个子命令,参数基本一致:url(位置)、-d/--proto_dir 或 --fbs_dir、-s/--ser_type <full.type.name>、-i/--filter <field>、-k/--black、-n/--native、-m/--max_str_count;pub 专属:-c <content> 或 -f <prototxt/fbstxt>、-t <times>、-l <period_ms>。
url(位置)、-t/--type <fmt>(输出格式:console/text/csv/json/bin/jpg/h264/h265/raw/pcd,默认 csv)、-c/--condition <fields>(逗号分隔的字段,CSV/JSON 必填)、-o/--out_dir <dir>(输出目录,默认 ./)、-m/--base_name <name>(输出文件基名,默认 output)、-f/--bag_file <bag>(离线 bag)、-b/--begin_time/-e/--end_time(秒,仅在 -f 下生效)、-n/--count <n>、--hz <hz>、--native、-d/--proto_dir、--fbs_dir、-q/--quiet、-l/--detail、-x/--expression <expr>(需 exprtk)。
源:/work/vlink/CMakeLists.txt 和各模块 CMakeLists.txt
| 选项 | 默认 | 说明 |
|---|---|---|
| BUILD_SHARED_LIBS | ON | 构建 .so/.dll;OFF → 静态库 |
| ENABLE_CXX_STD_20 | auto | 启用 C++20 特性 |
| ENABLE_SECURITY | ON | OpenSSL AES-128-CBC |
| ENABLE_SQLITE | ON | VDB bag 支持 |
| ENABLE_ZSTD | ON | bag zstd 压缩 |
| ENABLE_C_API | ON | libvlink-c_api |
| ENABLE_PYTHON_API | OFF | nanobind 绑定 |
| ENABLE_PROXY | ON | proxy_api / proxy_server / vlink-proxy |
| ENABLE_VIEWER | OFF | Qt GUI |
| ENABLE_VIEWER_FFMPEG / _OSG | ON | viewer 子开关(摄像头解码 / 3D 点云) |
| ENABLE_WEBVIZ | OFF | vlink-foxglove / vlink-rerun |
| ENABLE_WEBVIZ_FOXGLOVE | ON | webviz Foxglove 桥接子开关 |
| ENABLE_WEBVIZ_RERUN | OFF | webviz Rerun 桥接子开关 |
| ENABLE_COMPLETIONS | ON | 安装 bash/zsh 补全 |
| ENABLE_EXAMPLES / _WHOLE_EXAMPLES | 场景相关 / OFF | 示例构建 |
| ENABLE_TEST | ON | doctest 单元测试 |
| ENABLE_TEST_SANITIZE / _COVERAGE / _WARN | OFF | 测试附加检测 |
| ENABLE_DOC | OFF | Doxygen |
| ENABLE_CCACHE_BUILD | OFF | 编译缓存 |
| ENABLE_CPM_BUILD / _CPM_WHOLE_BUILD | OFF | CPM 构建 |
| SELECT_LOG_BACKEND | spdlog | spdlog/quill/dlt/native |
ENABLE_CLI_INFO / _BAG / _EPROTO / _EFBS / _LIST / _MONITOR / _DUMP / _CHECK / _BENCH(均默认 ON)。
| 模块 | 选项 | 默认 |
|---|---|---|
| intra / shm / shm2 / dds / ddsc / zenoh / mqtt / someip / fdbus | SKIP_<NAME> | OFF |
| ddsr / ddst / qnx | SKIP_<NAME> | **ON**(需要专有 SDK / 平台) |
| zenoh | ENABLE_ZENOH_PICO | OFF(用 zenoh-c,切到 pico 需显式开) |
可用目标:vlink::vlink(核心)、vlink::all、vlink::<module>(intra/shm/…)、vlink::c_api、vlink::proxy_api、vlink::proxy_server。
源:include/vlink/version.h、include/vlink/base/macros.h
**版本**:VLINK_VERSION_MAJOR、_MINOR、_PATCH、VLINK_VERSION(字符串)、VLINK_VERSION_TIMESTAMP、VLINK_VERSION_TAG、VLINK_VERSION_COMMIT_ID、VLINK_VERSION_CHECK(M,m,p)。
**特性门**:VLINK_ENABLE_CXX_STD_20 / _C_API / _SECURITY / _SQLITE / _ZSTD / _PROXY / _TEST / _CLI_INFO/BAG/EPROTO/EFBS/LIST/MONITOR/DUMP/CHECK/BENCH。
**导出**:VLINK_EXPORT / VLINK_PROXY_SERVER_EXPORT / VLINK_PROXY_API_EXPORT / VLINK_C_API_EXPORT。
**Transport 检测**:VLINK_SUPPORT_INTRA / _SHM / _SHM2 / _DDS / _DDSC / _DDSR / _DDST / _ZENOH / _SOMEIP / _MQTT / _FDBUS / _QNX。
**Schema 插件**:VLINK_HAS_SCHEMA_PLUGIN_PROTOBUF / _FLATBUFFERS。
**工具宏**:
**日志**(15 个): VLINK_LOG_LEVEL(0=Trace..5=Fatal,6=Off) · _CONSOLE_LEVEL · _FILE_LEVEL · _DIR · _MAX_SIZE(每个日志文件最大字节数,超过后轮转;默认 10 * 1024 * 1024) · _MAX_COUNT(默认 10) · _FLUSH_DELAY(ms,默认 500,0 = 每条立即刷) · _ENABLE_UTC · _PLUGIN(自定义 logger 插件名) · _STORE_STRATEGY(1 = spdlog 大小轮转,空 = 时间轮转) · _OPEN_APPEND · _BLOCK_SYNC · _CONSOLE_UNORDER · _CONSOLE_FMT(1 = 启用扩展格式,布尔,非模板) · _WRITE_DEPTH
**发现 / 剖析**:VLINK_DISCOVER_DISABLE · VLINK_DISCOVER_NATIVE · VLINK_PROFILER_ENABLE
**插件 / Schema**:VLINK_PLUGIN_DIR · VLINK_SCHEMA_PLUGIN · VLINK_URL_PLUGINS
**CLI 动态 schema**:VLINK_PROTO_DIR · VLINK_FBS_DIR
**运行时目录**:VLINK_TMP_DIR · VLINK_LOCK_DIR · VLINK_BAG_PATH · VLINK_BAG_TAG
**URL / Intra**:VLINK_URL_REMAP(重映射配置文件) · VLINK_INTRA_BIND
QoS**:VLINK_QOS_CONFIG(**JSON 配置文件路径,由 nlohmann::json 解析)
**SSL / TLS**(7 个):VLINK_SSL_VERIFY · _CA · _CERT · _KEY · _KEY_PASS · _SNI · _CIPHERS
**DDS 通用**(15 个):VLINK_DDS_BIND · _DOMAIN · _IP · _PEER · _MULTICAST_IP · _SHM · _UDP · _TCP · _MTU · _BUF · _LESS_MEMORY · _DEBUG · _EVENT_QOS · _FIELD_QOS · _METHOD_QOS;另 VLINK_FASTDDS_QOS_FILE、VLINK_TRAVODDS_QOS_FILE、VLINK_CYCLONEDDS_URI
**SHM**(2 个):VLINK_SHM_DEBUG · VLINK_SHM_DEPTH
**SHM2**(4 个):VLINK_SHM2_DEBUG · VLINK_SHM2_DEPTH · VLINK_SHM2_CONFIG · VLINK_SHM2_NOTIFY_EVERY(默认 1)
Zenoh**(30 个):VLINK_ZENOH_CONFIG(**JSON5 路径) · _DOMAIN · _MODE(router/peer/client) · _IP · _PEER · _LISTEN · _MULTICAST(默认 239.255.0.100) · _MULTICAST_IF · _MULTICAST_TTL · _GOSSIP(默认 1) · _RX_BUF · _MAX_MSG · _TX_QUEUE_DATA · _TX_QUEUE_RT · _LOWLATENCY · _QOS(默认 1) · _COMPRESSION · _TIMESTAMPS · _BATCH_ENABLED(默认 true) · _BATCH_TIME_LIMIT_MS(默认 1) · _ALLOWED_LOCALITY(local/remote/any,默认 any,需 Z_FEATURE_UNSTABLE_API) · _EVENT_QOS · _FIELD_QOS · _METHOD_QOS · _SHM(默认 0,需 Z_FEATURE_SHARED_MEMORY + Z_FEATURE_UNSTABLE_API) · _SHM_MODE(init/lazy,默认 init) · _SHM_SIZE(支持 K/M/G) · _SHM_THRESHOLD · _SHM_LOAN_THRESHOLD(默认 8192,低于此值 loan() 回退堆分配) · _SHM_BLOCKING(默认 0)
**MQTT**(5 个):VLINK_MQTT_BROKER(默认 tcp://localhost:1883) · _CLIENT_ID(默认 vlink_mqtt) · _DOMAIN · _KEEPALIVE(默认 60s) · _QOS
**SOME/IP**:VLINK_SOMEIP_CFG(vsomeip JSON 路径)
**Bench**(4 个,仅 VLINK_ENABLE_CLI_BENCH):VLINK_BENCH_READY_TIMEOUT_MS(默认 30000) · _START_TIMEOUT_MS(默认 15000) · _MEASURE_BUFFER_MS(默认 10000) · _CLEANUP_TIMEOUT_MS(默认 3000)
完整描述与按模块宏裁剪逻辑见 21-environment-vars.md。vlink-check env 按编译时启用的模块(VLINK_SUPPORT_* / VLINK_ENABLE_CLI_BENCH)动态裁剪输出。
**① Publish 前等订阅者就绪**:
**② 跨线程安全退出**:
**③ SHM 零拷贝发布(大帧)**:
**④ 订阅端手动 loan 归还**:
**⑤ 预设 QoS + 自定义覆盖**:
**⑥ 延迟 init + 显式初始化**:
**⑦ Method 模型的四种调用**:
**⑧ 日志 backtrace 辅助排错**:
**⑨ 获取节点 CPU 占比**:
| 症状 | 先试 |
|---|---|
| 编译报错 is_supported(type) / kUnknownType | 消息类型不被 Serializer 支持;见 06 的检测链 |
| Pub/Sub 建得起但收不到 | vlink-check diag;vlink-list;URL/Domain/security 是否完全一致 |
| shm:// 报错启动不了 | SHM 守护进程没起;**首选** vlink-proxy -c(内嵌 iox-roudi + 针对 VLink 载荷分级 chunk 内存池:默认 -l 2 7 档,-l 3 8 档,-l 1 6 档);备选 iox-roudi -c /path/to/roudi.toml |
| cannot find vlink::xxx CMake 报错 | find_package(vlink REQUIRED COMPONENTS xxx) 少了 component,或该 module 编译时被关了 |
| 大消息延迟飙升 | 检 QoS:History depth 过小丢样本;block_time 过大阻塞 publish |
| Bag 播放跳变 | 时间基准:选"相对"还是"绝对";见 12-bag-recording.md |
| 跨机器看不到对方 | 多播路由/防火墙/容器网络;vlink-check diag 看 239.255.0.100 |
| VLINK_RET_RUNTIME_ERROR | 构造时 C++ 异常;开 VLINK_LOG_LEVEL=0 看 what() |
速查卡设计原则:只放"查"的内容,不放"讲"的内容。要看完整文档请回 根 README.md。