目录
- 概念概述
- Qos 结构体字段详解
- 可靠性策略
- 历史策略
- 持久化策略
- 发布模式
- 活跃性策略
- 接收顺序策略
- 所有权策略
- Deadline 配置
- Lifespan 配置
- 延迟预算配置
- 资源限制配置
- VLink 扩展字段
- 预定义 QoS 配置
- 各通信模型的 QoS 设置方式
- DDS 后端特定说明
- 完整代码示例
概念概述
QoS(Quality of Service)是一组控制消息投递行为的策略参数。VLink 的 Qos 结构体以 DDS 标准 QoS 为蓝本,定义于 include/vlink/extension/qos.h。
配置 QoS 的方式:
- **URL 查询参数**:URL 上加 ?qos=<name> 引用已注册的命名 profile。
- **Conf 构造**:构造 DdsConf/DdscConf/DdsrConf/DdstConf/ZenohConf 时填写 qos 字段。
- **register_qos(name, qos)**:向上述 Conf 的静态表注册命名 profile,供 URL 引用。
- **load_global_qos_file(path)**(仅 DdsConf/DdstConf):加载 XML profile 文件。
- **延迟初始化 + set_property()**:InitType::kWithoutInit 构造 → set_property() → init()。
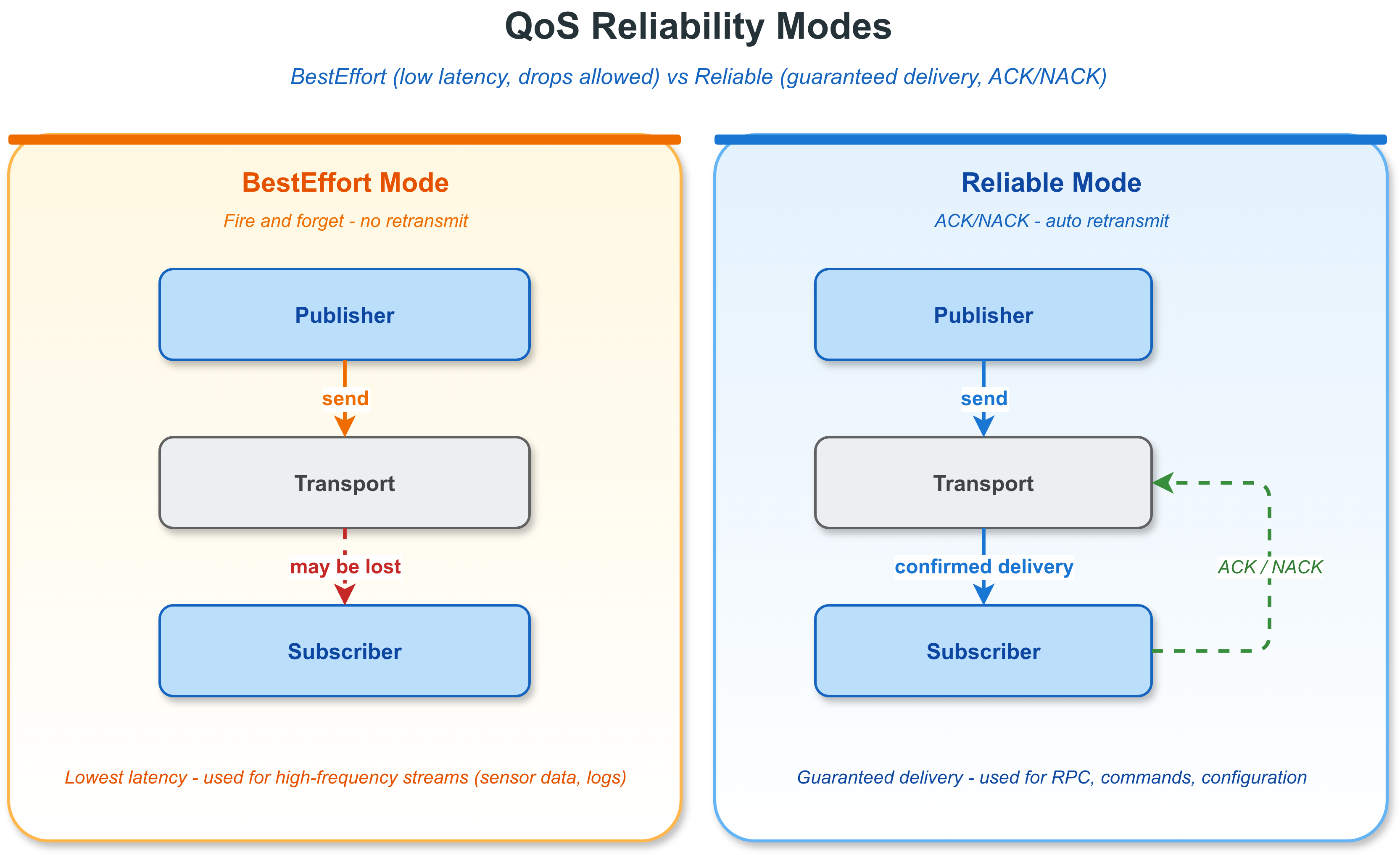
可靠性模式对比
QoS 可靠性模式
QoS 的维度(13 项子策略)
| 子策略 | 结构体 | 关键字段 |
| Reliability | Qos::Reliability | kind, block_time, heartbeat_time |
| History | Qos::History | kind, depth |
| Durability | Qos::Durability | kind |
| PublishMode | Qos::PublishMode | kind |
| Liveliness | Qos::Liveliness | kind, duration |
| DestinationOrder | Qos::DestinationOrder | kind |
| Ownership | Qos::Ownership | kind |
| Deadline | Qos::Deadline | period |
| Lifespan | Qos::Lifespan | duration |
| LatencyBudget | Qos::LatencyBudget | duration |
| ResourceLimits | Qos::ResourceLimits | max_samples / max_instances / max_samples_per_instance |
| Additions | Qos::Additions | priority, is_express |
各后端对 Qos 字段的消费情况
Qos 结构体是面向 DDS 的抽象。非 DDS 后端对不认识的字段静默忽略。
| 后端 | Qos 支持范围 |
| dds:// / ddsc:// / ddsr:// / ddst:// | 大部分 Qos 字段映射到原生 DDS QoS;register_qos()/qos_ext 可用,见各 *Conf.h |
| zenoh:// | 支持 ZenohConf::register_qos();具体字段映射由 Zenoh factory 解读(部分字段) |
| shm:// / shm2:// | ShmConf/Shm2Conf 无 qos 字段;行为主要由 depth、history、wait 等 Conf 字段决定 |
| intra:// | IntraConf 无 qos 字段;由 pipeline 和 type(queue/direct)控制 |
| mqtt:// | MqttConf 用自己的 qos 字段(0/1/2,MQTT QoS 语义),与 DDS Qos 无关 |
| someip:// | 不使用 Qos 结构体,由 SOME/IP Service/Instance/Method ID 定义行为 |
| fdbus:// / qnx:// | 不使用 Qos 结构体 |
任何声称"Qos 所有字段在所有后端都生效"的描述都不符合源码行为。
Qos 结构体字段详解
头文件:include/vlink/extension/qos.h
Quality of Service (QoS) policy aggregate for VLink publishers and subscribers.
Qos 是一个 POD 聚合结构体,所有子策略均有合理的默认值。必须将 valid 字段设 为 true,QoS 才会被传输层实际应用(预定义 QosProfile 常量已自动设置此字段)。
| 字段名 | 类型 | 默认值 | 说明 |
| name | char[20] | {0} | 配置名称,最多 19 字符 + NUL |
| valid | bool | false | 必须为 true 才生效(QosProfile 已设) |
| reliability | Qos::Reliability | kReliable, block_time=100ms, heartbeat=3000ms | 投递可靠性 |
| history | Qos::History | kKeepLast, depth=1 | 历史保留 |
| durability | Qos::Durability | kVolatile | 样本持久化 |
| publish_mode | Qos::PublishMode | kSync | 发布模式 |
| liveliness | Qos::Liveliness | kAutomatic, duration=-1 | 活跃性检测 |
| destination_order | Qos::DestinationOrder | kReceptionTimestamp | 接收端排序 |
| ownership | Qos::Ownership | kShared | 多写者所有权 |
| deadline | Qos::Deadline | period=-1 | 发布周期上限(-1 = 无约束) |
| lifespan | Qos::Lifespan | duration=-1 | 样本最长生存时间(-1 = 永久) |
| latency_budget | Qos::LatencyBudget | duration=0 | 可接受延迟(0 = 尽量低) |
| resource_limits | Qos::ResourceLimits | max_samples=6000, max_instances=10, max_samples_per_instance=500 | 队列容量 |
| additions | Qos::Additions | priority=kPriorityNormal, is_express=false | VLink 扩展 |
可靠性策略
Qos::Reliability 控制消息投递是否有重传保证。
struct Reliability final {
enum Kind : uint8_t {
kBestEffort = 0,
kReliable = 1,
};
Kind kind{kReliable};
int32_t block_time{100};
int32_t heartbeat_time{3000};
};
kBestEffort(尽力而为)
- 消息发送后不等待确认,网络拥塞或接收端队列满时消息可能丢失。
- CPU 和网络开销最小,适合高频率传感器数据(激光雷达、IMU)。
- Publisher 和 Subscriber 必须都使用 BestEffort,否则 DDS 会拒绝连接。
kReliable(可靠投递)
- 底层协议负责重传,确保消息最终到达接收端。
- block_time:当发送缓冲区满时,写操作最多阻塞的毫秒数;超时后返回失败。
- heartbeat_time:Writer 向 Reader 发送心跳包的间隔,用于驱动重传逻辑。
- 适合控制命令、配置参数、RPC 请求/响应等不允许丢失的场景。
注意事项
- Publisher 与 Subscriber 的 Reliability 必须兼容(相同或 Reliable > BestEffort)。
- DDS 标准规定:Reader 请求 Reliable 但 Writer 提供 BestEffort 时,匹配失败。
- shm 后端在进程内通信时丢包概率极低,但仍建议关键路径使用 Reliable。
历史策略
Qos::History 控制系统为后加入的订阅者或应用程序保留多少历史样本。
struct History final {
enum Kind : uint8_t {
kKeepLast = 0,
kKeepAll = 1,
};
Kind kind{kKeepLast};
int32_t depth{1};
};
kKeepLast(保留最新)
- 每个实例最多保留 depth 个样本,超出后丢弃最旧的。
- 内存占用固定且可预测,适合大多数实时场景。
- depth = 1 时退化为只保留最新值(类似字段模型)。
kKeepAll(保留全部)
- 保留所有未被应用读取的样本,直到被读取或受 ResourceLimits 强制丢弃。
- 适合 RPC 场景(Method 模型),确保每个请求都被处理。
- 内存消耗不可预测,需配合 ResourceLimits 使用。
深度(depth)选择建议
| 场景 | 建议 depth | 理由 |
| 传感器数据 | 10~50 | 允许短暂处理延迟时不丢帧 |
| 控制命令 | 1~10 | 通常只关心最新指令 |
| RPC 请求 | KeepAll | 每个请求必须被处理 |
| 状态字段 | 1 | 只需要最新值 |
| 大负载传输 | 200~500 | 为慢速网络提供充足缓冲 |
持久化策略
Qos::Durability 控制已发布的样本在 Publisher 端的缓存行为,影响后加入的 Subscriber 能否接收到之前发布的消息。
struct Durability final {
enum Kind : uint8_t {
kVolatile = 0,
kTransientLocal = 1,
kTransient = 2,
kPersistent = 3,
};
Kind kind{kVolatile};
};
kVolatile(易失,默认)
- 样本发布后不额外缓存,后加入的 Subscriber 只能接收到订阅之后发布的消息。
- 内存开销最小,适合高频流式数据。
kTransientLocal(本地瞬态)
- DataWriter 在内存中缓存最近 History.depth 个样本。
- 新 Subscriber 连接时,Writer 自动向其推送缓存的历史消息。
- **Field 模型(Getter/Setter)必须使用此模式**,确保 Getter 在启动时能获取到 Setter 已经发布的值。
- 适合服务发现、配置参数、静态地图等场景。
kTransient / kPersistent
- 需要外部 DDS 持久化服务支持,VLink 当前通常不使用这两种模式。
- 仅 DDS 后端支持,其他后端会忽略。
发布模式
Qos::PublishMode 控制 DataWriter 的发送操作是否在调用线程上同步完成。
struct PublishMode final {
enum Kind : uint8_t {
kSync = 0,
kASync = 1,
};
Kind kind{kSync};
};
| 模式 | 延迟 | 吞吐量 | 适用场景 |
| kSync | 低 | 中 | 控制命令、RPC、字段更新 |
| kASync | 极低 | 高 | 高频传感器数据、大负载批量发送 |
活跃性策略
Qos::Liveliness 控制系统如何检测 DataWriter 是否仍然存活。
struct Liveliness final {
enum Kind : uint8_t {
kAutomatic = 0,
kManualParticipant = 1,
kManualTopic = 2,
};
Kind kind{kAutomatic};
int32_t duration{-1};
};
- kAutomatic:只要 Publisher 进程存活,中间件自动维护活跃性声明。
- duration:Reader 期望 Writer 在此时间内至少声明一次活跃性;超时触发 LIVELINESS_CHANGED 状态事件。-1 表示不设置租约。
接收顺序策略
Qos::DestinationOrder 控制 Reader 端对收到样本的排序方式。
struct DestinationOrder final {
enum Kind : uint8_t {
kReceptionTimestamp = 0,
kSourceTimestamp = 1,
};
Kind kind{kReceptionTimestamp};
};
- kReceptionTimestamp:以 Reader 接收到消息的本地时间戳排序,不依赖时钟同步。
- kSourceTimestamp:以 Writer 发布时打的时间戳排序,需要各节点时钟同步,适合 多源数据融合场景。
所有权策略
Qos::Ownership 控制多个 Writer 对同一数据实例的写权限。
struct Ownership final {
enum Kind : uint8_t {
kShared = 0,
kExClusive = 1,
};
Kind kind{kShared};
};
- kShared:多个 Publisher 可以向同一 topic 发布,Reader 会收到全部数据。
- kExClusive:配合 OwnershipStrength 使用,强度最高的 Writer 独占该实例的写入权, 常用于主备热切换场景。
Deadline 配置
Qos::Deadline 约束 Publisher 发布数据的最大时间间隔。
struct Deadline final {
int32_t period{-1};
};
- 当 Publisher 在 period 毫秒内未发布新数据时,触发 DEADLINE_MISSED 状态事件。
- Subscriber 端设置的 deadline 必须 >= Publisher 端的 deadline(DDS 匹配规则)。
- 适合安全关键场景(如心跳检测):将 period 设为预期发布频率的 2~3 倍。
int32_t period
Max interval between writes (ms). -1 = no constraint.
定义 qos.h:232
Aggregate Quality of Service policy for a VLink communication endpoint.
定义 qos.h:86
bool valid
Must be true for the Qos to be applied by the transport.
定义 qos.h:305
Deadline deadline
Maximum period between publications.
定义 qos.h:313
Lifespan 配置
Qos::Lifespan 设置样本的最大存活时间,超时后样本被自动丢弃。
struct Lifespan final {
int32_t duration{-1};
};
- 超过 duration 毫秒的样本在 Writer 缓存和 Reader 队列中均会被删除。
- 适合时效性强的数据(如实时位置信息),避免 Subscriber 处理过时数据。
- -1 表示样本永不过期(默认值)。
延迟预算配置
Qos::LatencyBudget 向中间件提示可接受的端到端延迟上限。
struct LatencyBudget final {
int32_t duration{0};
};
- 这是一个优化提示而非强制约束:中间件可利用此信息进行批量发送或调度优化。
- duration = 0:请求最低可能延迟,中间件不允许为了聚合而延迟发送。
- 较大的值允许中间件将多条消息打包发送,可能提高吞吐量。
资源限制配置
Qos::ResourceLimits 限制内部 DataWriter / DataReader 队列的最大容量。
struct ResourceLimits final {
int32_t max_samples{6000};
int32_t max_instances{10};
int32_t max_samples_per_instance{500};
};
| 字段 | 说明 | 调整建议 |
| max_samples | Writer/Reader 内部队列总容量 | 高吞吐场景适当增大 |
| max_instances | 支持的 key 实例数(DDS Keyed Topic) | 单 topic 通常保持默认 10 |
| max_samples_per_instance | 单个实例的样本缓存上限 | 不能超过 max_samples |
**注意**:max_samples_per_instance * max_instances 不得超过 max_samples,否则 中间件可能拒绝初始化。
VLink 扩展字段
Qos::Additions 是 VLink 在标准 DDS QoS 之外的专有扩展。
struct Additions final {
enum Priority : uint8_t {
kPriorityRealTime = 1,
kPriorityHigh = 2,
kPriorityNormal = 4,
kPriorityLow = 6,
kPriorityBackground= 7,
};
Priority priority{kPriorityNormal};
bool is_express{false};
};
- priority:当 MessageLoop 使用优先级队列时,决定回调的调度顺序。
- is_express:启用后消息会绕过普通调度队列直接投递,适合对延迟极敏感的传感器 数据(如 kSensor profile 启用此选项)。
预定义 QoS 配置
头文件:include/vlink/extension/qos_profile.h
QosProfile 命名空间提供 **13 个预定义 profile**(include/vlink/extension/qos_profile.h),valid 字段全部预设为 true,可直接使用。
vlink::DdsConf::register_qos("sensor", vlink::QosProfile::kSensor);
Type-safe publisher for the VLink event communication model.
定义 publisher.h:102
Transport configuration for the dds:// Fast-DDS RTPS backend.
Pre-defined QoS profiles for common VLink communication patterns.
预定义配置汇总
| 配置名 | 字符串名 | Reliability | History | Durability | PubMode | 优先级 | Express | 适用场景 |
| kEvent | "event" | Reliable | KeepLast(10) | Volatile | Sync | RealTime | 否 | 离散控制事件 |
| kMethod | "method" | Reliable | KeepAll(1) | Volatile | Sync | High | 否 | RPC 请求/响应 |
| kField | "field" | Reliable | KeepLast(1) | TransientLocal | Sync | High | 否 | 最新值状态同步 |
| kSensor | "sensor" | BestEffort | KeepLast(20) | Volatile | ASync | Normal | 是 | 高频传感器数据 |
| kParameter | "parameter" | Reliable | KeepLast(1000) | Volatile | Sync | Normal | 否 | 配置参数 |
| kService | "service" | Reliable | KeepLast(10) | TransientLocal | Sync | Normal | 否 | 服务发现与注册 |
| kClock | "clock" | BestEffort | KeepLast(1) | Volatile | ASync | Low | 否 | 时间同步广播 |
| kStatic | "static" | Reliable | KeepAll(1) | TransientLocal | Sync | Normal | 否 | 静态数据(地图、标定) |
| kLight | "light" | Reliable | KeepLast(1) | Volatile | ASync | High | 否 | 轻量高频消息 |
| kPoor | "poor" | BestEffort | KeepLast(5) | Volatile | ASync | Background | 否 | 低优先级尽力传输 |
| kBetter | "better" | BestEffort | KeepLast(50) | Volatile | Sync | RealTime | 否 | 高吞吐尽力传输(同步发送,延迟可预测) |
| kBest | "best" | Reliable | KeepLast(200) | Volatile | Sync | RealTime | 否 | 高吞吐可靠传输(同步发送,延迟可预测) |
| kLarge | "large" | Reliable(block=100ms, heartbeat=500ms) | KeepLast(500) | Volatile | Sync | Low | 否 | 大负载传输(点云/地图) |
kLarge 显式设置 heartbeat_time=500 以适应慢速传输,其余均使用默认 3000ms。
按名称查找配置
auto it = qos_map.find("sensor");
if (it != qos_map.end()) {
vlink::DdsConf::register_qos("sensor", it->second);
}
VLINK_EXPORT const std::unordered_map< std::string, Qos > & get_available_qos_map() noexcept
Returns a reference to the global map of all named QoS profiles.
命名 Profile 注册机制
DDS 家族与 Zenoh 的 Conf 提供静态 register_qos(name, qos):
- DdsConf::register_qos()
- DdscConf::register_qos()
- DdsrConf::register_qos()
- DdstConf::register_qos()
- ZenohConf::register_qos()
URL 上使用 ?qos=<name> 后,Conf 会去各自的静态表里查找。保留键名 part、topic、pub、sub、writer、reader、depth 不能作为 profile 名(源码 register_qos_internal 检查后 fatal log 并拒绝)。同名重复注册也会被拒绝。
ShmConf、Shm2Conf、IntraConf、MqttConf、SomeipConf、FdbusConf、QnxConf 没有 register_qos() 接口。
qos 与 qos_ext 的关系(DDS 家族)
DdsConf / DdsrConf / DdstConf 支持扩展 QoS map qos_ext,键为 part / topic / pub / sub / writer / reader。qos 和 qos_ext **互斥**:同时非空会让 is_valid() 返回 false。
全局 XML 文件
仅 DdsConf 和 DdstConf 提供 load_global_qos_file(filepath)(Fast-DDS 与 TravoDDS 的 XML profile 文件)。DdscConf / DdsrConf 不提供此接口;CycloneDDS 的配置通过 VLINK_CYCLONEDDS_URI 传入。
各通信模型的 QoS 设置方式
Event 模型(Publisher / Subscriber)
vlink::DdsConf::register_qos("sensor", vlink::QosProfile::kSensor);
vlink::DdsConf::register_qos("custom_event", qos);
sub.listen([](const MyMsg& msg) {
});
sub2.listen([](const MyMsg& msg) {
});
pub2.set_property("depth", "20");
pub2.set_property("qos", "sensor");
pub2.init();
Type-safe subscriber for the VLink event communication model.
定义 subscriber.h:110
@ kWithoutInit
Defer initialisation; call init() manually.
定义 types.h:133
Type-safe event-model publisher for VLink topics.
@ kPriorityHigh
High-priority processing.
定义 qos.h:294
Priority priority
Task dispatch priority.
定义 qos.h:300
Kind kind
Durability kind.
定义 qos.h:145
@ kVolatile
No persistence beyond the DataWriter lifetime.
定义 qos.h:139
@ kKeepLast
Keep only the depth most recent samples.
定义 qos.h:118
int32_t depth
Number of samples to keep per instance (KeepLast only).
定义 qos.h:123
Kind kind
History retention kind.
定义 qos.h:122
Kind kind
Publish mode.
定义 qos.h:163
@ kASync
Asynchronous publish via background thread.
定义 qos.h:160
Kind kind
Delivery guarantee kind.
定义 qos.h:102
@ kReliable
Retransmit until acknowledged.
定义 qos.h:99
Durability durability
Sample persistence policy.
定义 qos.h:308
Additions additions
VLink-specific extensions.
定义 qos.h:317
Reliability reliability
Delivery guarantee policy.
定义 qos.h:306
History history
Sample retention policy.
定义 qos.h:307
PublishMode publish_mode
Synchronous or asynchronous publishing.
定义 qos.h:309
Type-safe event-model subscriber for VLink topics.
Method 模型(Client / Server)
vlink::DdsConf::register_qos("method", vlink::QosProfile::kMethod);
server.listen([](const Request& req, Response& resp) {
resp.result = process(req);
});
client.wait_for_connected();
auto resp = client.invoke(Request{...});
Type-safe client for the VLink method (RPC) communication model.
定义 client.h:123
Type-safe server for the VLink method (RPC) communication model.
定义 server.h:108
Type-safe method-model client (caller side) for VLink RPC.
Type-safe method-model server (handler side) for VLink RPC.
Field 模型(Setter / Getter)
Field 模型必须使用 TransientLocal 持久化策略,确保 Getter 在启动时能立即获取 到最新值。推荐使用 kField 预定义配置。
vlink::DdsConf::register_qos("field", vlink::QosProfile::kField);
setter.set(42);
if (auto val = getter.get()) {
std::cout << "mode: " << *val << std::endl;
}
Type-safe field reader for the VLink field communication model.
定义 getter.h:105
Type-safe field writer for the VLink field communication model.
定义 setter.h:91
Type-safe field-model reader for VLink topics.
Type-safe field-model writer for VLink topics.
DDS 后端特定说明
QoS 兼容性规则
DDS 标准规定 Publisher 和 Subscriber 的 QoS 必须兼容,否则匹配失败(无法通信):
| Publisher QoS | Subscriber 要求 | 是否兼容 |
| Reliable | Reliable | 兼容 |
| Reliable | BestEffort | 兼容 |
| BestEffort | BestEffort | 兼容 |
| BestEffort | Reliable | 不兼容 |
| Volatile | Volatile | 兼容 |
| TransientLocal | TransientLocal | 兼容 |
| TransientLocal | Volatile | 兼容 |
| Volatile | TransientLocal | 不兼容 |
FastDDS / CycloneDDS 特有注意事项
- DDS 的 ResourceLimits 影响 DataWriter 和 DataReader 的内部内存预分配大小, 在嵌入式环境中需根据实际物理内存调整。
- heartbeat_time 直接影响重传响应速度:值越小,丢包后恢复越快,但 CPU 开销增加。
- 使用 kASync 发布模式时,DDS 内部会启动异步发送线程;进程内节点数量多时 注意线程总数。
多 DDS 域(Domain ID)
不同 Domain ID 的节点相互隔离,QoS 设置不影响跨域可见性。在 VLink 中通过 DdsConf::domain 字段或 URL 参数 ?domain=N 配置。
完整代码示例
示例 1:自定义 QoS 的 Event 模型
#include <iostream>
#include <thread>
#include <chrono>
struct SensorData {
float x;
float y;
float z;
};
int main() {
vlink::DdsConf::register_qos("my_sensor", sensor_qos);
sub.listen([](const SensorData& data) {
std::cout << "x=" << data.x << " y=" << data.y << " z=" << data.z << std::endl;
});
pub.wait_for_subscribers();
for (int i = 0; i < 100; ++i) {
SensorData d{static_cast<float>(i), static_cast<float>(i * 2), 0.0f};
pub.publish(d);
std::this_thread::sleep_for(std::chrono::milliseconds(10));
}
return 0;
}
bool is_express
If true, bypass normal queuing for immediate delivery.
定义 qos.h:301
@ kPriorityNormal
Default application priority.
定义 qos.h:295
@ kBestEffort
Fire-and-forget; no retransmission.
定义 qos.h:98
示例 2:使用预定义配置的 Field 模型
#include <iostream>
#include <thread>
#include <chrono>
int main() {
vlink::DdsConf::register_qos("field", vlink::QosProfile::kField);
setter.set(2);
std::this_thread::sleep_for(std::chrono::milliseconds(200));
if (auto val = getter.get()) {
std::cout << "drive_mode = " << *val << std::endl;
} else {
std::cout << "no value yet" << std::endl;
}
return 0;
}
示例 3:按名称动态选择 QoS 配置
#include <string>
#include <iostream>
bool register_qos_by_name(const std::string& profile_name) {
auto it = qos_map.find(profile_name);
if (it != qos_map.end()) {
vlink::DdsConf::register_qos(profile_name, it->second);
std::cout << "Registered QoS profile: " << profile_name << std::endl;
return true;
} else {
std::cerr << "Unknown QoS profile: " << profile_name << std::endl;
return false;
}
}
int main() {
std::string profile_name = "event";
if (register_qos_by_name(profile_name)) {
pub.wait_for_subscribers();
pub.publish(std::string("system started"));
}
return 0;
}
相关文档:
示例 4:大负载传输的 QoS 配置
int main() {
vlink::DdsConf::register_qos("large", vlink::QosProfile::kLarge);
});
pub.wait_for_subscribers();
pub.publish(large_data);
return 0;
}
Versatile byte buffer with small-buffer optimisation, ownership semantics and compression.
Versatile 128-byte byte buffer with SBO, five ownership modes and compression helpers.
定义 bytes.h:113
static Bytes create(size_t size, uint8_t offset=0) noexcept
Creates an owned Bytes buffer of the given size.