本章介绍 VLink 所有通信原语共享的 Node<ImplT, SecT> 基类模板,包括模板参数化继承架构、生命周期管理、属性配置、零拷贝借贷、安全加密等通用能力。有关各通信原语的专属 API,请参阅 Event 模型、Method 模型 和 Field 模型。
1. 概述
Node<ImplT, SecT> 是 VLink 中所有通信端点共享的基类模板(源码:include/vlink/node.h),各通信原语通过 Node<ImplT, SecT> 间接持有 std::unique_ptr<ImplT> 形式的传输实现。VLink 的六种通信原语全部继承自它:
| 通信模型 | 发送端 | 接收端 |
| Event | Publisher<T> | Subscriber<T> |
| Method | Client<Req,Resp> | Server<Req,Resp> |
| Field | Setter<T> | Getter<T> |
Node 统一管理传输层实现指针 (impl_)、驱动节点生命周期,并提供安全加密、零拷贝借贷、属性配置、消息循环绑定、CPU 性能分析等共享服务。
1.1 架构层次
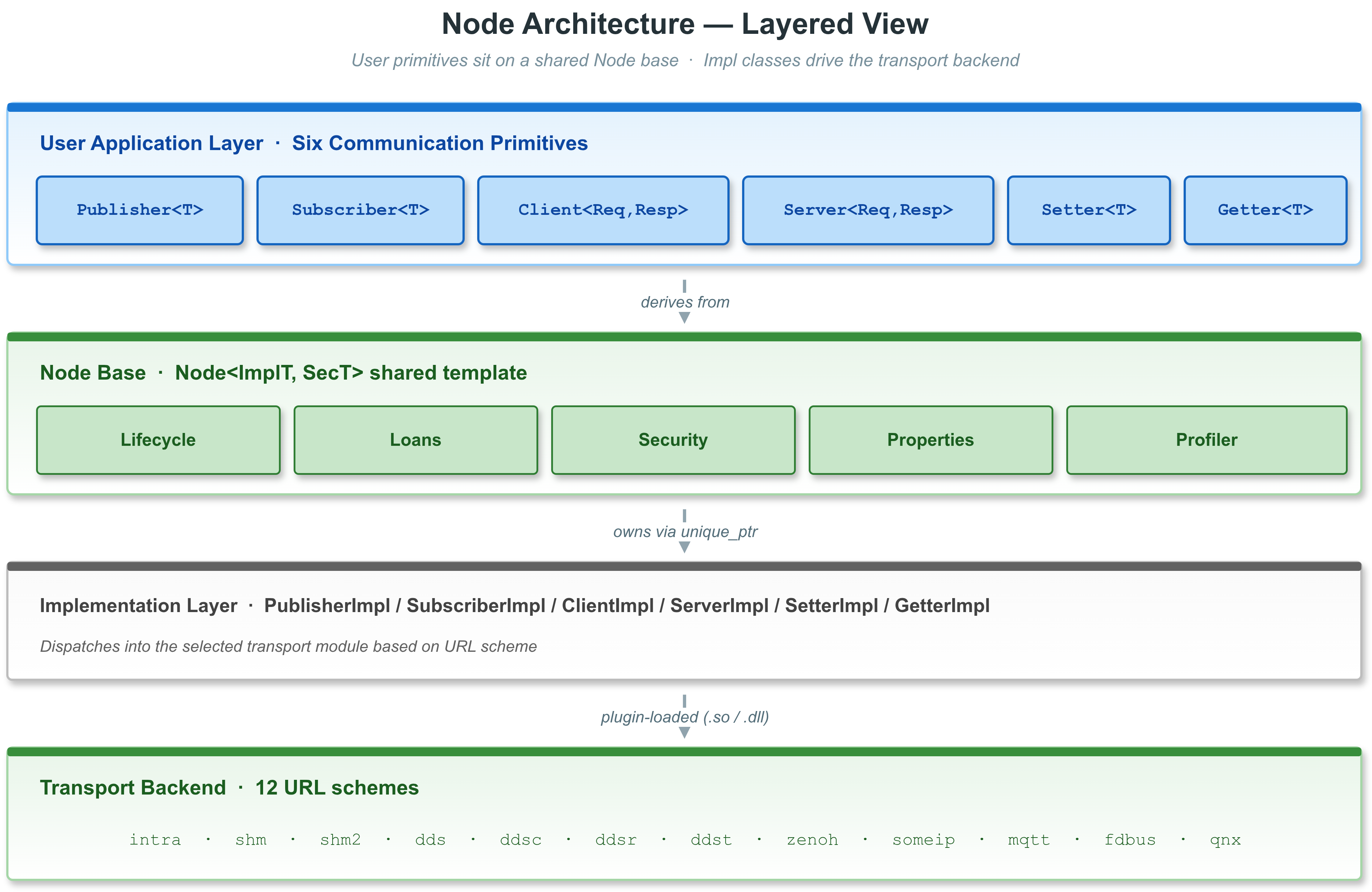
Node Architecture Layers
2. 模板参数与角色
2.1 模板参数
template <typename ImplT, SecurityType SecT = SecurityType::kWithoutSecurity>
class Node;
| 模板参数 | 含义 | 约束 |
| ImplT | 传输后端实现类 | 必须继承 NodeImpl;构造时由 static_assert 校验 |
| SecT | 编译期安全模式 | 默认 SecurityType::kWithoutSecurity;可显式为 kWithSecurity |
Node 构造函数中的静态断言:
static_assert(std::is_base_of_v<NodeImpl, ImplT>, "ImplT must base of NodeImpl.");
2.2 ImplType 节点角色
ImplType(include/vlink/impl/types.h)是一个 uint8_t 的位掩码枚举,用于标识节点在通信中的角色:
| 枚举值 | 十进制 | 十六进制 | 说明 |
| kUnknownImplType | 0 | 0x00 | 未确定 |
| kPublisher | 1 | 0x01 | Event 发布者 |
| kSubscriber | 2 | 0x02 | Event 订阅者 |
| kSetter | 4 | 0x04 | Field 设置者 |
| kGetter | 8 | 0x08 | Field 获取者 |
| kServer | 16 | 0x10 | Method 服务端 |
| kClient | 32 | 0x20 | Method 客户端 |
这些值可按位或组合,Conf 据此声明支持的节点角色。
2.3 TransportType 传输方案
TransportType(enum class : uint8_t)标识当前节点使用的传输后端:
| 枚举值 | 值 | URL 前缀 | 传输技术 |
| kUnknown | 0 | (无) | 未知/不支持 |
| kIntra | 1 | intra:// | 进程内队列 |
| kShm | 2 | shm:// | Iceoryx 共享内存 |
| kShm2 | 3 | shm2:// | Iceoryx2 共享内存 |
| kZenoh | 4 | zenoh:// | Zenoh |
| kDds | 5 | dds:// | Fast-DDS RTPS |
| kDdsc | 6 | ddsc:// | CycloneDDS |
| kDdsr | 7 | ddsr:// | RTI DDS |
| kDdst | 8 | ddst:// | TravoDDS |
| kSomeip | 9 | someip:// | SOME/IP (vsomeip) |
| kMqtt | 10 | mqtt:// | MQTT (Paho C) |
| kFdbus | 11 | fdbus:// | FDBus IPC |
| kQnx | 12 | qnx:// | QNX IPC (仅 QNX) |
源码中存在的 scheme 不代表当前构建一定启用对应模块(参见 Conan recipe 的组件导出清单)。
2.4 核心成员变量
| 成员 | 类型 | 初值 | 说明 |
| has_inited_ | std::atomic_bool | false | 初始化标志,CAS 保护 |
| impl_ | std::unique_ptr<ImplT> | 空 | 传输后端实现对象 |
| security_ | std::optional<Security> | 空 | 安全加解密对象(仅 kWithSecurity 构造后填充) |
| quit_mtx_ | std::optional<std::mutex> | 空 | 安全退出互斥锁(set_safety_quit(true) 时创建) |
| proto_arena_ | void* | nullptr | Protobuf Arena 指针(仅 proto 指针类型使用) |
| is_support_loan_ | bool | false | 在 init() 中由 impl_->is_support_loan() 填写 |
| is_manual_unloan_ | bool | false | 是否启用手动归还模式 |
3. 生命周期管理
3.1 生命周期状态图
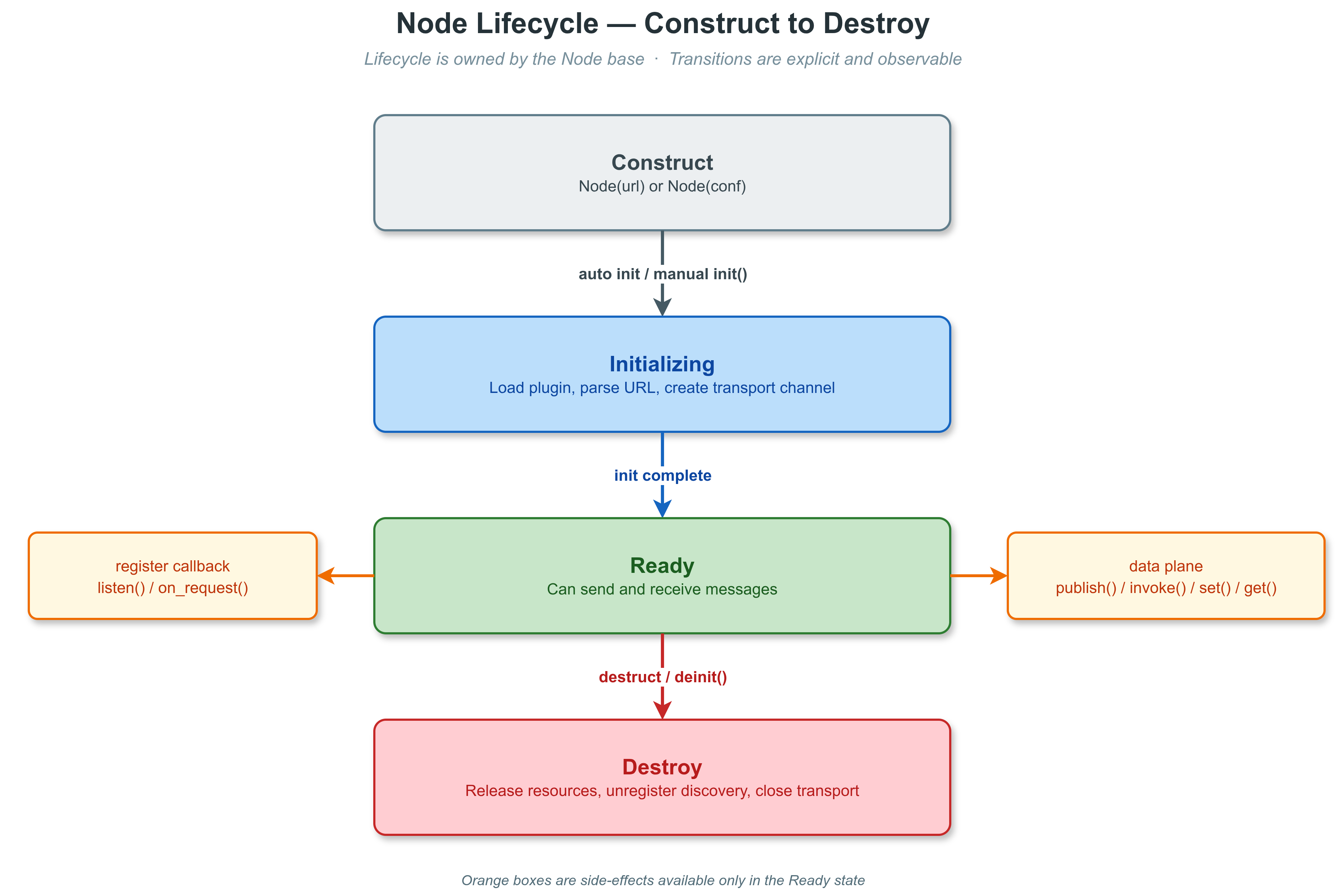
Node Lifecycle State Machine
3.2 构造阶段
节点的构造支持三种方式:
方式一:URL 字符串构造(最常用)
Publisher<MyMsg> pub("dds://vehicle/speed");
内部实现流程:
- 将 URL 字符串包装为 Url 对象
- Url 解析 transport 前缀,选择对应的 Conf 工厂
- Conf::parse() 验证配置有效性
- Conf::create_publisher() 创建对应的 PublisherImpl
- 设置 impl_->transport_type、impl_->ser_type、impl_->schema_type、impl_->is_cdr_type
- 若 SecT == kWithSecurity,调用 enable_security() 初始化安全模块
- 默认情况下(InitType::kWithInit)立即调用 init()
方式二:Conf 配置对象构造
DdsConf conf("vehicle/speed", 0, 0, "reliable");
Publisher<MyMsg> pub(conf);
编译期使用 static_assert 检查 ConfT 是否支持当前节点角色:
static_assert(ConfT::get_allow_impl_type() & kImplType, "Conf not support publisher mode.");
方式三:延迟初始化构造
Publisher<MyMsg> pub("dds://topic", InitType::kWithoutInit);
pub.set_ser_type("my.custom.Type", SchemaType::kProtobuf);
pub.set_property("dds.ip", "192.168.1.100");
pub.init();
3.3 init() – 初始化
init() 使用原子 CAS (Compare-And-Swap) 操作保证只能被成功调用一次:
bool expected = false;
if (!has_inited_.compare_exchange_strong(expected, true)) {
return false;
}
初始化流程(见 include/vlink/internal/node-inl.h):
- 版本检查 – impl_->check_version(Version{VLINK_VERSION_MAJOR, VLINK_VERSION_MINOR, VLINK_VERSION_PATCH}) 比较编译期版本与运行时版本,不匹配时记录警告。
- 传输初始化 – impl_->init() 创建底层传输通道(如 DDS Entity、SHM Channel)。
- 扩展初始化 – impl_->init_ext() 注册到全局 DiscoveryReporter;若全局 Profiler 已启用且节点满足条件,会创建 CpuProfiler。
- 查询借贷支持 – 保存 impl_->is_support_loan() 到 is_support_loan_ 标志。
重复调用 init() 无副作用,CAS 判失败后直接返回 false。
3.4 deinit() – 反初始化
deinit() 同样使用原子 CAS 保证只执行一次:
bool expected = true;
if (!has_inited_.compare_exchange_strong(expected, false)) {
return false;
}
反初始化流程:
- 中断 – 调用 interrupt(),唤醒所有阻塞等待
- 安全退出锁 – 若启用了 safety_quit 模式,在 quit_mtx_ 锁保护下执行后续步骤
- 传输清理 – 调用 impl_->deinit(),释放底层传输资源
- 扩展清理 – 调用 impl_->deinit_ext(),从 DiscoveryReporter 注销
3.5 析构自动 deinit
template <typename ImplT, SecurityType SecT>
inline Node<ImplT, SecT>::~Node() {
deinit();
}
析构函数自动调用 deinit()。因此在大多数场景下,用户不需要显式调用 deinit(),节点超出作用域时自动完成清理。仅在需要提前释放资源时才需要手动调用。
3.6 全局初始化
NodeImpl 构造函数会调用静态方法 global_init()(src/impl/node_impl.cc),确保进程级单例被初始化:
static void NodeImpl::global_init() {
Logger::get();
Bytes::init_memory_pool();
BagWriter::global_get();
DiscoveryReporter::global_get();
}
方法内部的单例懒加载自带线程安全,多次调用仅首次有效果。
4. 延迟初始化
InitType 枚举控制节点是否在构造时立即初始化:
| 枚举值 | 值 | 说明 |
| kWithoutInit | 0 | 延迟初始化,需手动调用 init() |
| kWithInit | 1 | 构造时立即初始化(默认) |
延迟初始化的典型场景:
Publisher<MyMsg> pub("dds://topic", InitType::kWithoutInit);
pub.set_property("dds.ip", "192.168.1.100");
pub.set_ser_type("my.proto.MyMsg", SchemaType::kProtobuf);
pub.set_discovery_enabled(false);
pub.init();
SecurityPublisher<MyMsg> sec_pub("shm://secure_topic", InitType::kWithoutInit);
sec_pub.set_security_key("my-aes-key");
sec_pub.init();
auto pub_ptr = Publisher<MyMsg>::create_unique("dds://topic", InitType::kWithoutInit);
pub_ptr->set_property("dds.qos.reliability", "reliable");
pub_ptr->init();
**重要**:set_security_key()、set_security_callbacks() 可以在 init() 之前或之后调用。但 set_property() 通常需要在 init() 之前设置才能生效。
5. 属性配置与查询
5.0 基础查询方法
TransportType get_transport_type() const;
const std::string& get_url() const;
- get_transport_type() 返回节点所绑定的传输后端枚举(如 kDds、kShm、kIntra 等)。
- get_url() 返回构造此节点时使用的 URL 字符串(如 "dds://vehicle/speed")。通过 ConfT 构造的节点返回空字符串。
5.1 序列化类型 – set_ser_type()
void set_ser_type(const std::string& ser_type, SchemaType schema_type = SchemaType::kUnknown);
const std::string& get_ser_type() const;
SchemaType get_schema_type() const;
序列化类型通常由模板参数 MsgT 在编译期自动推导。但在某些场景下需要手动覆盖,例如动态类型或自定义类型名称。 当你已经明确知道 ser_type 与 schema_type 时,直接调用 set_ser_type(ser_type, schema_type)。如果只是修改同一 family 下的具体类型名,则可以省略第二个参数。
行为细节:
- 若在 init() **之前**调用:直接更新对应的 wire metadata 字段
- 若在 init() **之后**调用:自动执行 deinit_ext() -> 修改 wire metadata -> init_ext() 三步操作
- 如果第二个参数显式传入非 kUnknown family,会原子更新 ser_type + schema_type
- 如果第二个参数为 SchemaType::kUnknown(默认值),表示“不显式覆盖当前 family”
- string/json/raw 这类 raw 标识和 vlink::zerocopy::* 会按 ser_type 自动同步 family
- 如果当前 family 已经是 kProtobuf 或 kFlatbuffers,单独调用 set_ser_type() 修改同 family 下的具体类型名时会保留这个 family
- 如果当前 family 是 kRaw 或 kZeroCopy,但新的 ser_type 已无法再推断出对应 family,则会回退为 kUnknown
- set_ser_type("") 会同时清空 ser_type 与 schema_type
- 若已有非空类型且新类型不同:打印警告日志
Publisher<Bytes> pub("dds://topic", InitType::kWithoutInit);
pub.set_ser_type("my.proto.MessageType", SchemaType::kProtobuf);
pub.set_ser_type("my.proto.MessageTypeV2");
pub.init();
5.2 安全配置 – set_security_key() / set_security_callbacks()
void set_security_key(const std::string& key);
void set_security_callbacks(Security::Callback&& encrypt_callback,
Security::Callback&& decrypt_callback);
两个方法均包含编译期断言:
static_assert(SecT == SecurityType::kWithSecurity, "Must be security type.");
- 在非 kWithSecurity 实例上调用会编译失败;
- intra:// 与 dds:// CDR 类型运行时不支持安全加密,调用 set_security_key() 会触发 VLOG_F(抛出 Exception::RuntimeError);
- 内置 AES-128-CBC 需以 ENABLE_SECURITY=ON 构建(依赖 OpenSSL);未启用时使用内置 key 路径会打印警告。
SecurityPublisher<MyMsg> pub("shm://topic");
pub.set_security_key("my-secret-key");
SecurityPublisher<MyMsg> pub2("dds://topic");
pub2.set_security_callbacks(
[](const Bytes& in, Bytes& out) -> bool {
return true;
},
[](const Bytes& in, Bytes& out) -> bool {
return true;
}
);
5.3 发现服务 – set_discovery_enabled()
void set_discovery_enabled(bool enable);
bool get_discovery_enabled() const;
控制节点是否向全局 DiscoveryReporter 注册自身。关闭发现可以降低 CPU 和网络开销。
行为细节:
- 若在 init() 之前调用:直接设置标志
- 若在 init() 之后调用:自动执行 deinit_ext() -> 修改标志 -> init_ext() 三步操作
5.4 录制路径 – set_record_path()
void set_record_path(const std::string& path);
为节点启用单独的消息录制。传入非空路径时通过 BagWriter::filter_get() 获取(或共享)录包器实例;传入空字符串则释放该 recorder。
**注意**:intra:// 与 dds:// CDR 类型不支持录制 —— 调用 set_record_path(path) 会先触发 VLOG_F;即使绕过此检查,try_record() 内部也会直接跳过这两种传输。
5.5 SSL/TLS 配置 – set_ssl_options()
void set_ssl_options(const SslOptions& options);
为节点配置传输层 SSL/TLS 加密。该方法将 SslOptions 的字段合并到节点内部属性映射(ssl.* 属性键),传输后端在 init() 阶段读取这些属性以建立 TLS 连接。**必须在 init() 之前调用**。
SslOptions 结构体字段:
| 字段 | 属性键 | 说明 |
| verify_peer | ssl.verify | 是否验证对端证书(默认 true) |
| ca_file | ssl.ca | CA 证书文件路径(PEM 格式) |
| cert_file | ssl.cert | 客户端证书文件路径(PEM 格式) |
| key_file | ssl.key | 客户端私钥文件路径(PEM 格式) |
| key_password | ssl.key_password | 私钥密码 |
| server_name | ssl.server_name | SNI 服务器名称覆盖 |
| ciphers | ssl.ciphers | 密码套件字符串(OpenSSL 格式) |
SSL 在 ca_file 或 cert_file 非空时被视为启用。支持的传输后端:
| 后端 | TLS 机制 |
| mqtt:// | Paho C MQTTClient_SSLOptions |
| dds:// | Fast-DDS TCPv4TransportDescriptor::tls_config |
| ddsc:// | CycloneDDS ddsi_config ssl 字段(需 DDS_HAS_SSL) |
| zenoh:// | zenoh-c transport/link/tls 配置键 |
也可通过 set_property() 逐项设置 ssl.* 属性,或通过环境变量 VLINK_SSL_CA、VLINK_SSL_CERT、VLINK_SSL_KEY 等设置默认值。
Publisher<MyMsg> pub("mqtt://sensor/data", InitType::kWithoutInit);
SslOptions ssl;
ssl.ca_file = "/etc/certs/ca.pem";
ssl.cert_file = "/etc/certs/client.pem";
ssl.key_file = "/etc/certs/client-key.pem";
pub.set_ssl_options(ssl);
pub.init();
5.6 自定义属性 – set_property() / get_property()
void set_property(const std::string& prop, const std::string& value);
std::string get_property(const std::string& prop);
提供键值对形式的扩展机制,用于传输后端特定的配置调优。属性存储在 NodeImpl 内部的 PropertiesMap 中,受 std::shared_mutex 保护,线程安全。
Publisher<MyMsg> pub("dds://topic", InitType::kWithoutInit);
pub.set_property("dds.ip", "192.168.1.100");
pub.set_property("dds.port", "7400");
pub.init();
std::string ip = pub.get_property("dds.ip");
5.7 Protobuf Arena 绑定 – bind_proto_arena()
void bind_proto_arena(void* proto_arena);
当 MsgT 是原始 Protobuf 指针类型(如 MyProto*)时,必须绑定 Arena。Arena 必须比节点生存期更长。未绑定时,收到第一条消息会触发致命错误。
Subscriber<MyProto*> sub("dds://topic");
sub.bind_proto_arena(&arena);
sub.listen([](MyProto* msg) {
});
6. MessageLoop 绑定
bool attach(class MessageLoop* message_loop);
bool detach();
class MessageLoop* get_message_loop() const;
6.1 工作原理
默认情况下,节点的回调在传输线程上直接调用。通过 attach() 将节点绑定到 MessageLoop 后,回调被 post_task() 投递到 MessageLoop 线程执行,实现回调的线程切换。
这对于单线程应用代码特别有用,可以避免多线程同步问题。
6.2 使用示例
MessageLoop loop;
Subscriber<MyMsg> sub("dds://vehicle/speed");
sub.attach(&loop);
sub.listen([](const MyMsg& msg) {
});
loop.run();
6.3 注意事项
| 操作 | 行为 |
| attach | 若已绑定其他 MessageLoop,返回 false |
| detach | 若从不同线程调用,会等待 MessageLoop 空闲后再清除指针 |
| detach | detach 后回调恢复在传输线程上执行 |
| 状态回调 | call_status() 也会通过绑定的 MessageLoop 分发 |
7. 零拷贝借贷
bool is_support_loan() const;
Bytes loan(int64_t size);
bool return_loan(const Bytes& bytes);
void set_manual_unloan(bool manual_unloan);
bool is_manual_unloan() const;
7.1 支持的传输后端
| 传输后端 | 是否支持 loan |
| shm:// | 是 |
| shm2:// | 是 |
| 其他 | 否 |
7.2 Publisher 端使用
Publisher<MyStruct> pub("shm://topic");
if (pub.is_support_loan()) {
Bytes buf = pub.loan(sizeof(MyStruct));
if (!buf.empty()) {
new (buf.data()) MyStruct{42, 3.14};
pub.publish(buf);
}
}
7.3 Subscriber 端手动归还
Subscriber<Bytes> sub("shm://topic");
sub.set_manual_unloan(true);
sub.listen([&sub](const Bytes& data) {
process(data);
sub.return_loan(data);
});
**注意**:
- set_manual_unloan() 基类默认实现仅打印警告日志,只有 Subscriber 和 Getter 覆盖了此方法
- 未归还的 loan 会耗尽共享内存池
- 启用安全模式 (kWithSecurity) 时不使用 loan,因为加密后数据大小与原始大小不同
8. 挂起与恢复
bool suspend();
bool resume();
bool is_suspend() const;
suspend() 临时暂停节点的消息传递,resume() 恢复。具体行为取决于传输后端:
| 传输后端 | suspend 行为 |
| 部分支持 | 缓存传入消息 |
| 部分支持 | 丢弃传入消息 |
| 不支持时 | 打印警告日志,返回 false |
NodeImpl 的基类实现默认不支持 suspend,会打印 "Not Support function [suspend]." 并返回 false。需要具体的传输后端覆盖实现。
Subscriber<MyMsg> sub("dds://topic");
sub.listen([](const MyMsg& msg) { });
sub.suspend();
sub.resume();
9. 中断机制
virtual void interrupt();
interrupt() 用于唤醒任何阻塞在该节点上的等待操作。内部机制:
- 设置 NodeImpl 的 is_interrupted 原子标志为 true
- 子类(如 Publisher、Client、Getter)覆盖此方法,额外唤醒各自的条件变量
受影响的阻塞方法:
- Publisher::wait_for_subscribers()
- Client::wait_for_connected()
- Getter::wait_for_value()
被中断的方法会立即返回 false。
Publisher<MyMsg> pub("dds://topic");
std::thread t([&pub]() {
std::this_thread::sleep_for(std::chrono::seconds(1));
pub.interrupt();
});
bool ok = pub.wait_for_subscribers(Timeout::kInfinite);
t.join();
**注意**:deinit() 内部会自动调用 interrupt(),确保析构时不会死锁。
10. CPU 性能分析
double get_cpu_usage() const;
返回节点在活跃的 publish/receive 操作中消耗的 CPU 时间占比。
10.1 启用条件
| 条件 | 说明 |
| 编译期 | 未定义 VLINK_DISABLE_PROFILER 宏 |
| 运行时 | 设置环境变量 VLINK_PROFILER_ENABLE |
| 节点级别 | init_ext() 中检测到全局 profiler 启用时自动创建 |
10.2 返回值
| 返回值 | 含义 |
| [0.0, 100.0] | CPU 使用百分比 |
| -1.0 | Profiler 未附加到此节点 |
Publisher<MyMsg> pub("dds://topic");
double usage = pub.get_cpu_usage();
if (usage >= 0) {
}
10.3 实现原理
Publisher::publish() 和 Subscriber 的内部接收路径中使用 CpuProfilerGuard RAII 对象,在操作前后自动记录 CPU 时间:
#ifndef VLINK_DISABLE_PROFILER
CpuProfilerGuard profiler_guard(this->impl_->profiler.get());
#endif
11. 状态查询与内省
Status::BasePtr get_status(Status::Type type) const;
void register_status_handler(StatusCallback&& callback);
const AbstractNode* get_abstract_node() const;
11.0 抽象节点句柄
get_abstract_node() 返回底层传输图中的 AbstractNode 指针,可用于 AbstractFactory 查询同图中的对等节点,或传递给代理监控 API 进行运行时拓扑检查。若传输后端不暴露 AbstractNode,返回 nullptr。
11.1 支持的传输后端
状态查询和状态回调仅在 DDS 系列传输上有效:
| 传输后端 | 是否支持状态查询 |
| dds:// | 是 |
| ddsc:// | 是 |
| ddsr:// | 是 |
| ddst:// | 是 |
| 其他 | 否 (返回 Unknown) |
在不支持的传输上调用会打印警告并返回 Status::Unknown 对象。
11.2 使用示例
Publisher<MyMsg> pub("dds://topic");
pub.register_status_handler([](const Status::BasePtr& status) {
});
auto status = pub.get_status(Status::Type::kLivelinessChanged);
11.3 状态回调与 MessageLoop
若节点已 attach() 到 MessageLoop,状态回调会通过 MessageLoop::post_task() 分发到 loop 线程。否则直接在传输线程调用。
12. 工厂方法
每个通信端点类(Publisher、Subscriber 等)都提供静态工厂方法:
static UniquePtr create_unique(const std::string& url_str, InitType type = InitType::kWithInit);
static SharedPtr create_shared(const std::string& url_str, InitType type = InitType::kWithInit);
12.1 使用示例
auto pub = Publisher<MyMsg>::create_unique("dds://topic");
auto sub = Subscriber<MyMsg>::create_shared("dds://topic");
auto client = Client<Req, Resp>::create_unique("zenoh://service", InitType::kWithoutInit);
client->set_property("timeout", "5000");
client->init();
12.2 对比直接构造
| 方式 | 内存位置 | 智能指针类型 | 适用场景 |
| 栈上构造 | 栈 | 无 | 局部使用,生命周期明确 |
| create_unique | 堆 | unique_ptr | 需要动态生命周期,独占所有权 |
| create_shared | 堆 | shared_ptr | 需要共享所有权 |
13. 安全模板
13.1 编译期约束
VLink 通过模板参数 SecurityType SecT 在编译期决定是否启用安全功能。使用 static_assert 保证安全 API 只能在安全模式的实例上调用。
SecurityPublisher<MyMsg> pub("shm://topic");
pub.set_security_key("my-key");
Publisher<MyMsg> pub2("shm://topic");
pub2.set_security_key("my-key");
13.2 便捷别名
VLink 为每种通信原语提供预定义的安全别名类型:
| 别名类型 | 等价于 |
| SecurityPublisher | Publisher<MsgT, SecurityType::kWithSecurity> |
| SecuritySubscriber | Subscriber<MsgT, SecurityType::kWithSecurity> |
| SecurityServer | Server<ReqT, RespT, SecurityType::kWithSecurity> |
| SecurityClient | Client<ReqT, RespT, SecurityType::kWithSecurity> |
| SecuritySetter | Setter<ValueT, SecurityType::kWithSecurity> |
| SecurityGetter | Getter<ValueT, SecurityType::kWithSecurity> |
13.3 不支持安全的传输
以下传输后端不支持安全功能,调用安全 API 会触发致命错误 (VLOG_F):
- intra:// – 进程内通信无需加密
- dds:// 且使用 CDR 序列化 – CDR 数据由 DDS 直接管理,无法在 VLink 层加密
13.4 安全与零拷贝
启用安全模式后,Publisher::publish() 内部不会使用 loan 机制。因为加密后的数据大小与原始序列化数据大小不同,无法预先分配精确的 loan 缓冲区。
14. 安全退出模式
bool get_safety_quit() const;
void set_safety_quit(bool safety_quit);
安全退出模式通过 std::mutex 保护回调执行和 deinit() 操作,防止回调执行过程中节点被销毁导致的 use-after-free 竞态。
14.1 工作原理
启用后:
- 每次回调调用都在 quit_mtx_ 锁保护下执行(通过 invoke_callback())
- deinit() 也在同一把锁的保护下执行 impl_->deinit() 和 impl_->deinit_ext()
- 这确保了回调不会与 deinit 并发执行
auto sub = Subscriber<MyMsg>::create_shared("dds://topic");
sub->set_safety_quit(true);
sub->listen([](const MyMsg& msg) {
});
14.2 使用建议
| 场景 | 是否启用 |
| 节点生命周期短于回调作用域 | 建议启用 |
| 异步环境中节点可能被提前销毁 | 建议启用 |
| 高频消息的热路径 | 不建议启用 (有锁开销) |
| 节点生命周期与应用程序一致 | 不需要 |
15. 属性配置时机与线程模型
15.1 属性配置时机
| 属性方法 | init 前 | init 后 |
| set_property() | 推荐 | 一般不再生效 |
| set_ser_type() | 推荐 | 自动 deinit_ext / init_ext |
| set_discovery_enabled() | 推荐 | 自动 deinit_ext / init_ext |
| set_security_key() | 可以 | 可以 |
| set_record_path() | 可以 | 可以 |
| set_ssl_options() | 必须 | 不生效(需在 init 前) |
| bind_proto_arena() | 可以 | 在 listen() 前即可 |
15.2 回调线程模型
| 回调路径 | 默认线程 | attach 后线程 |
| Subscriber::listen() | 传输线程 | MessageLoop 线程 |
| Getter::listen() | 传输线程 | MessageLoop 线程 |
| Server::listen() | 传输线程 | MessageLoop 线程 |
| register_status_handler | 传输线程 | MessageLoop 线程 |
| Publisher::publish() | 调用者线程 | 调用者线程 |
| Client::invoke() | 调用者线程 | 调用者线程 |
16. 相关文档